こんにちは、Electrician'sNotesWebサイトの読者の皆様とゲストの皆様。
数日前、ある読者から、AIRE80C2シリーズの単相モーターの接続を依頼されました。 実際、このモーターは完全に単相ではありません。 非同期コンデンサモーターのカテゴリーから2相に帰することがより正確でより正確になります。 したがって、この記事では、そのようなエンジンだけを接続することに焦点を当てます。
したがって、AIRE 80C2非同期コンデンサ単相モーターがあり、次の技術データがあります。
- 電力2.2(kW)
- 速度3000rpm
- 効率76%
- cosφ=0.9
- 動作モードS1
- 主電源電圧220(V)
- 保護の程度IP54
- 作業コンデンサ容量50(uF)
- 動作コンデンサ電圧450(V)
このエンジンは小型の掘削リグに取り付けられており、接続する必要があります 電気ネットワーク 220(B)。
この記事では、AIRE80C2単相モーターの全体寸法と取り付け寸法については説明しません。 これらは、このエンジンのパスポートに記載されています。 接続に移りましょう。
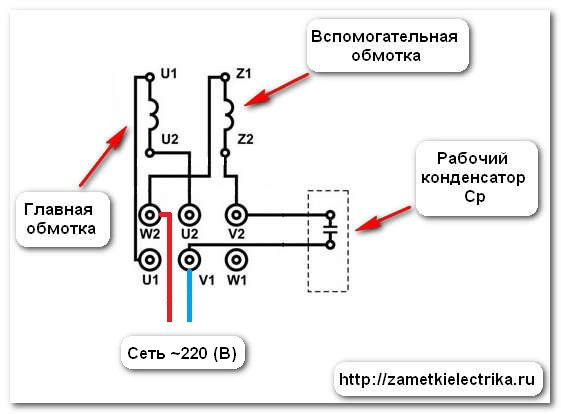
コンデンサ単相モーターの接続
非同期単相コンデンサーモーターは、2つの同一の巻線で構成されており、空間内で互いに90度電気的にシフトしています。
メインまたは作業中(U1、U2)
補助またはランチャー(Z1、Z2)
ローターについて言及するのを忘れました。
ほとんどの場合、ローター 単相モーター短絡しました。 かご形回転子については、の記事で詳しく説明しました。
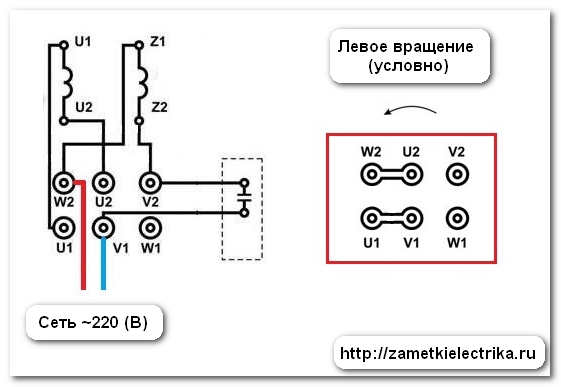
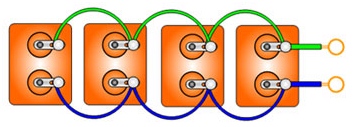
単相モーター(コンデンサー)の配線図
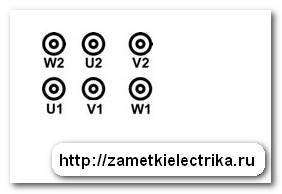
さて、コンデンサーモーターの接続図にたどり着きました。 このようなエンジンには、6つの結論があります。
これらのピンは次の順序で接続されます。
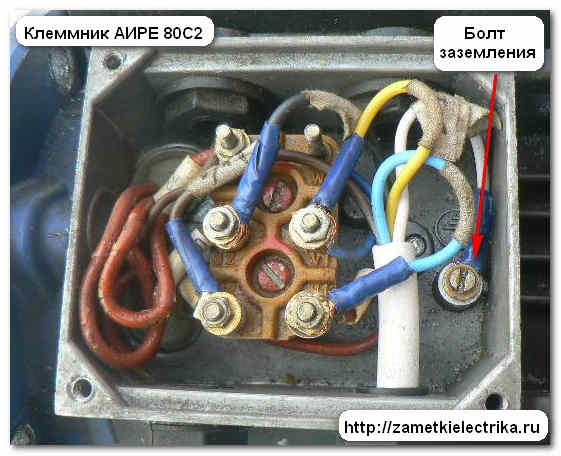
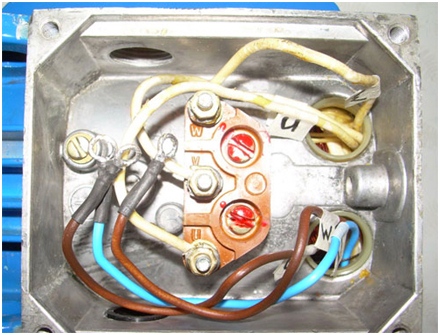
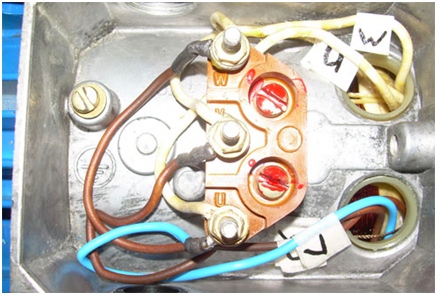
AIRE80C2モーターリード付きの端子台は次のようになります。
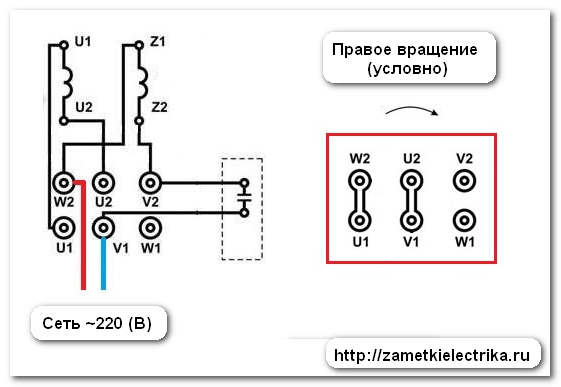
モーターをに接続するには 順方向、下の図に示すように、端子W2とV1に交流電圧〜220(V)を印加し、ジャンパーを配置する必要があります。 端子U1-W2とV1-U2の間。
モーターをに接続するには 逆方向、同じ端子W2とV1に交流電圧〜220(V)を印加し、下の図に示すようにジャンパーを配置する必要があります。 端子U1-V1とW2-U2の間。
これはすべて明らかだと思います。 上の図に示すように、モーターの希望の回転にジャンパーを取り付け、単相モーターを主電源に接続します。
しかし、回転方向をリモートで制御する必要がある場合はどうすればよいでしょうか。 そして、このために収集する必要があります。 これを行う方法については、次の記事で学習します。
新しい記事のリリースを見逃さないように、購読してください(購読フォームは記事の最後とサイトの右側の列にあります)、あなたのメールアドレスを示してください。
ご清聴ありがとうございました。
単相モーターは交流で動作し、単相ネットワークに接続されています。 ネットワークの電圧は220ボルト、周波数は50ヘルツである必要があります。
このタイプの電気モーターは、主に低電力デバイスで使用されます。
- 家庭用器具。
- ファン低電力。
- パンプス。
- 工作機械原材料等の加工に。
5Wから10kWの電力のモデルが製造されます。
単相モーターの効率、電力、始動トルクの値は、同じサイズの三相デバイスよりも大幅に低くなっています。 過負荷容量も3相モーターの方が高くなります。 したがって、単相メカニズムの電力は、同じサイズの三相メカニズムの電力の70%を超えることはありません。
デバイス
デバイス:
- 実際には2つのフェーズがあります、ただし、そのうちの1つだけが機能するため、モーターは単相と呼ばれます。
- すべての電気機械のように、単相モーターは、固定(固定子)と可動(回転子)の2つの部分で構成されています。
- を表します、固定コンポーネント上に、単相交流電源に接続された1つの動作巻線があります。
に 強みこのタイプのモーターは、かご形巻線を備えたローターである設計の単純さに起因する可能性があります。 欠点は、始動トルクと効率が低いことです。
主な欠点 単相電流 -それらを生成することの不可能性 磁場回転を実行します。 したがって、単相電気モーターは、ネットワークに接続されたときにそれ自体で始動することはありません。
電気機械の理論では、規則が適用されます。磁場が回転子を回転させるためには、固定子に少なくとも2つの巻線(相)が必要です。 また、一方の巻線をもう一方の巻線に対して特定の角度でシフトする必要があります。
動作中、交流電界が巻線の周りを流れます。
- これによれば、単相モーターの固定セクションには、いわゆる始動巻線があります。 作動巻線に対して90度オフセットされています。
- シフト電流回路に位相シフトリンクを含めることで得られます。 これには、アクティブな抵抗、インダクタ、およびコンデンサを使用できます。
- 基礎として固定子と回転子には2212電磁鋼が使用されています。
構造が2相および3相であるが、整合回路を介して単相電源に接続されている単相電気モーター(コンデンサー電気モーター)を呼び出すのは誤りです。 このようなデバイスの両方のフェーズは動作可能であり、常にオンになっています。
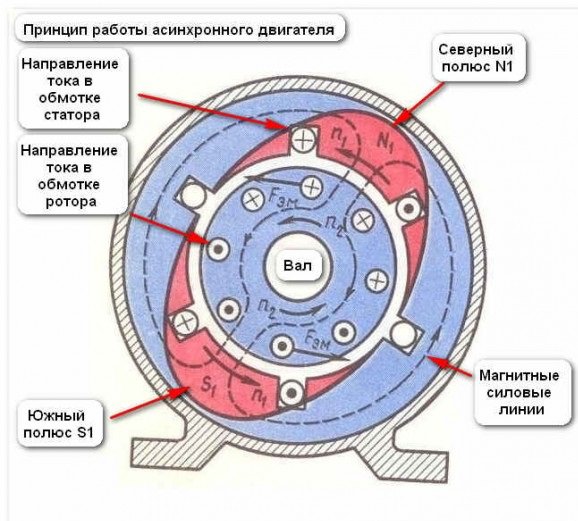
動作原理と起動方式
動作原理:
- 電気ショックモーターの固定子に脈動磁界が発生します。 このフィールドは、異なる方向に回転し、振幅と周波数が等しい2つの異なるフィールドと見なすことができます。
- ローターが静止しているとき、これらのフィールドは、絶対値は等しいが、反対方向のモーメントのように見えます。
- エンジンに特別な始動メカニズムがない場合、その後、開始時に結果として生じるトルクはゼロに等しくなります。これは、エンジンが回転しないことを意味します。
- ローターを一方向に回転させた場合、次に対応するモーメントが優勢になり始めます。これは、モーターシャフトが特定の方向に回転し続けることを意味します。
起動スキーム:
- 磁場によって発射、モーターの可動部分を回転させます。 これは、メインと追加の2つの巻線によって作成されます。 後者は小さく、ランチャーです。 静電容量またはインダクタンスを介して主電気ネットワークに接続されます。 接続は起動時にのみ行われます。 低電力モーターでは、始動フェーズが短絡されます。
- エンジン始動スタートボタンを数秒間押し続けると、ローターが加速します。
- スタートボタンを離したとき、電気モーターは二相モードから単相モードに移行し、その動作は交流磁場の対応する成分によってサポートされます。
- 開始フェーズ短期間の操作用に設計されています-通常は最大3秒です。 もっと 長い時間負荷がかかると、過熱、絶縁体の発火、メカニズムの破損につながる可能性があります。 したがって、スタートボタンをタイムリーに離すことが重要です。
- 信頼性を向上させるために単相モーターのハウジングには、遠心スイッチとサーマルリレーが組み込まれています。
- 遠心スイッチ機能ローターが定格速度に達したときに開始フェーズをオフにすることで構成されます。 これは、ユーザーの介入なしに自動的に行われます。
- サーマルリレー巻線の両方の相が許容レベルを超えて熱くなると、両方の相がオフになります。
繋がり
このデバイスには、220ボルトの電圧で1相が必要です。 これは、家庭用コンセントに差し込むことができることを意味します。 これが、人口の間でエンジンが人気を博している理由です。 すべての人のために 家庭用器具、ジューサーからグラインダーまで、このタイプのメカニズムがインストールされています。
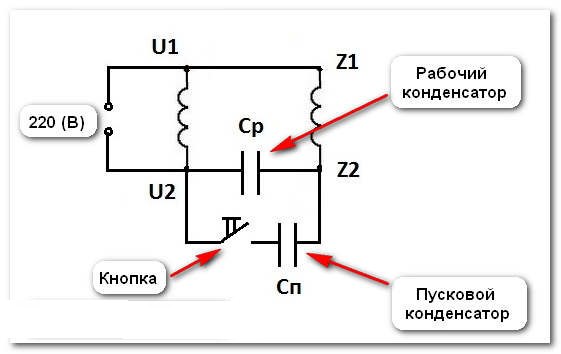
始動コンデンサと実行コンデンサとの接続
電気モーターには、始動巻線付きとコンデンサー付きの2種類があります。
- 最初のタイプのデバイス、始動巻線は、始動中のみコンデンサを使用して機能します。 機械が通常の速度に達すると、電源がオフになり、1回の巻き上げで作業が続行されます。
- 2番目のケースでは、コンデンサが動作しているモーターの場合、追加の巻線はコンデンサを介して恒久的に接続されます。
電気モーターは、あるデバイスから取り出して別のデバイスに接続することができます。 たとえば、 洗濯機または、掃除機を使用して、芝刈り機、切断機などを操作できます。
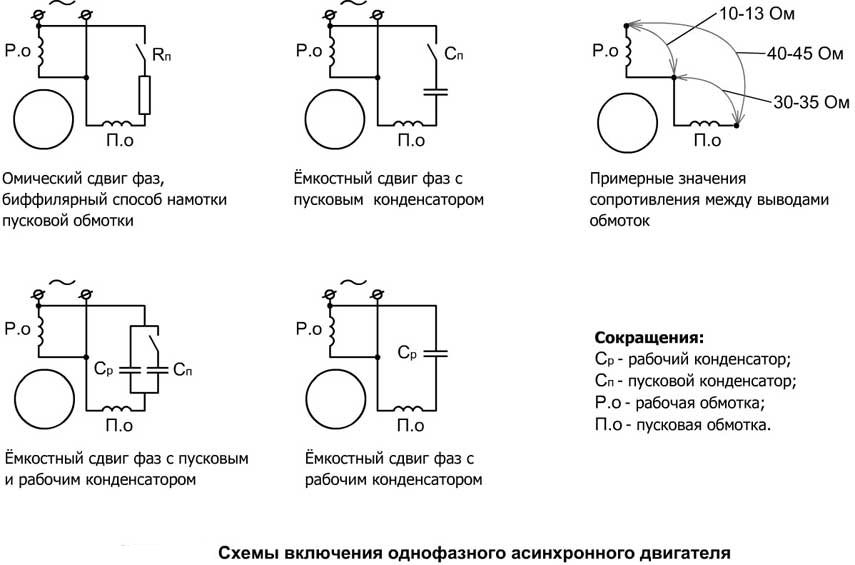
単相モーターをオンにするための3つのスキームがあります。
- 1つのスキームで、始動巻線の作業は、コンデンサを使用して、始動期間のみ実行されます。
- 2スキーム短期間の接続も提供しますが、コンデンサではなく抵抗を介して発生します。
- 3スキーム最も一般的です。 この方式では、コンデンサは始動時だけでなく、常に電源に接続されています。
始動抵抗付きの電気モーターの接続:
- 補助巻線このようなデバイスは、アクティブな抵抗が増加します。
- 電気機械を始動するにはこのタイプの場合、始動抵抗を使用できます。 始動巻線と直列に接続する必要があります。 したがって、巻線電流間で30°の位相シフトを得ることが可能であり、これはメカニズムを開始するのに十分です。
- その上、位相シフトは、より高い抵抗値とより低いインダクタンスを持つ開始位相を使用することによって取得できます。 このような巻線は、巻数が少なく、ワイヤが細くなります。
コンデンサースタート付きモーターの接続:
- これらの電気機械用始動回路にはコンデンサが含まれており、始動期間中のみオンになります。
- 最大値に達するには始動トルクには、回転を行う円形の磁場が必要です。 それが発生するためには、巻線電流を互いに90°回転させる必要があります。 抵抗やチョークなどの位相シフト要素は、必要な位相シフトを提供しません。 適切な静電容量を選択した場合、回路にコンデンサを含めるだけで、90°の位相シフトを得ることができます。
- 計算するどのワイヤーがどのワイヤーに属しているかは、抵抗を測定することでどの巻線を行うことができますか。 作動巻線の場合、その値は常に開始巻線の場合(通常は約30オーム)よりも小さくなります(約12オーム)。 したがって、作動巻線のワイヤの断面は、最初の巻線の断面よりも大きくなります。
- コンデンサモーターが消費する電流に応じて選択されます。 たとえば、電流が1.4 Aの場合、6uFのコンデンサが必要です。
健康診断
目視検査でエンジン性能を確認するには?
以下は、を示す欠陥です 考えられる問題エンジンの場合、誤った操作または過負荷が原因である可能性があります。
- 壊れた小道具または取り付けスロット。
- モーターの真ん中で暗くなった塗料(過熱を示します)。
- 亀裂を通して外部物質がハウジング内のデバイスに引き込まれます。
エンジンの性能を確認するには、まず1分間電源を入れてから、約15分間作動させます。
その後、エンジンが高温になっている場合は、次のようにします。
- 多分ベアリングが汚れている、挟まれている、または単に摩耗している。
- 原因コンデンサの静電容量が高すぎる可能性があります。
コンデンサを外し、手動でモーターを始動します。モーターが加熱しなくなった場合は、コンデンサの静電容量を減らす必要があります。
モデルの概要
電気モーターAIR
最も人気のあるものの1つは、AIRシリーズの電気モーターです。レッグ1081で作成されたモデルと、組み合わせ実行のモデル(レッグ+フランジ2081)があります。
フット+フランジモーターは、フットマウントモーターよりも約5%コストがかかります。
原則として、メーカーは12ヶ月の保証を提供します。
回転高さ56〜80mmの電動機の場合、フレームはアルミ製です。 回転高さが90mmを超えるモーターは鋳鉄製です。
モデルは、出力、回転速度、回転軸の高さ、効率の点で互いに異なります。
エンジンが強力であるほど、そのコストは高くなります。
- 0.18kWモーター 3000ルーブル(AIRE 56 B2電気モーター)で購入できます。
- 3kWモデル約1万ルーブル(AIRE 90 LB2)の費用がかかります。
速度に関しては、1500および3000 rpmの周波数を持つ最も一般的なモデルですが、他の周波数のエンジンもあります。 等しい出力では、1500rpmモーターのコストは3000rpmモーターのコストよりわずかに高くなります。
1相のモーターの回転軸の高さは56mmから90mmまで変化し、出力に直接依存します。エンジンが強力であるほど、回転軸の高さが高くなり、価格が高くなります。
モデルが異なれば効率も異なり、通常は67%から75%の間です。 効率が高いほど、モデルのコストが高くなります。
また、1982年に設立されたイタリアの会社AASOによって製造されたエンジンにも注意を払う必要があります。
- だから、電気モーターAASOシリーズ53、で使用するために特別に設計された ガスバーナー。 これらのモーターは、洗濯機、温風発生器、セントラルヒーティングシステムにも使用できます。
- 電気モーターシリーズ60、63、71給水設備で使用するために設計されています。 また、同社は110および110コンパクトシリーズのユニバーサルモーターを提供しており、バーナー、ファン、ポンプ、吊り上げ装置、その他の機器など、さまざまな用途で区別されています。
AASO製のモーターを4600ルーブルで購入できます。
モーター接続
多くの場合、自分のニーズに合わせて電気モーターを220または380ボルトのネットワークに接続するためのスキームを探す必要がありますが、これは機器のパスポートデータと一致していません。 このアプローチは効率の低下を意味しますが、正当化される場合もあります。 このブロックには、モーターを3相および単相ネットワークに接続するための最もアクセスしやすく技術的に適切なスキームが含まれています。
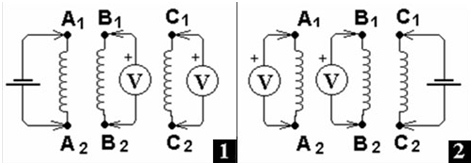
単相電気モーターに(相数に応じて)巻線を1つだけ配置すると、固定子内の界磁は回転せずに脈動し、シャフトを手で回転させない限り、始動や押し出しはありません。 手作業による介入なしに回転を発生させるために、補助始動巻線が追加されました。 これは第2フェーズであり、90度シフトし、スイッチをオンにした瞬間にローターを押しますが、モーターがオンになっているため、 単相ネットワーク、それはまだ単相と呼ばれています。 現在、単相非同期電気モーターには、動作時と始動時の2つの巻線があります。 始動巻線は、シャフトを始動するために短時間だけオンになります(3秒以内)。 労働者はいつもオンです。 テスターを使用して、巻線の結論を判断できます。 この図は、巻線と共通端子の関係を示しています。 モーターを始動するには、両方の巻線に220ボルトを印加し、速度を上げた後、すぐにスターターをオフにする必要があります。 位相シフトには、オーム抵抗、コンデンサ、インダクタが使用されます。 さらに、抵抗は別個の抵抗の形ではなく、コイルのインダクタンスが同じままで、長さが長くなるために抵抗が増加する場合、バイファイラー技術を使用して巻かれた開始巻線の一部である可能性があります 銅線。 配線図 単相電気モーター図1に示されています。
作動巻線と補助巻線が常に主電源に接続されているモーターがあります。 実際、それらは2フェーズです。 固定子内部の界磁が回転します。 この場合のコンデンサは、位相をシフトするのに役立ちます。 このようなシステムでは、両方の巻線が同じ断面のワイヤで作られています。
三相電気モーターの接続
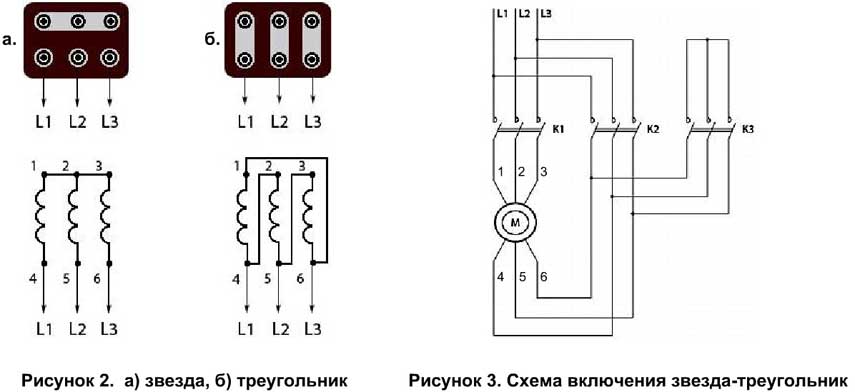
ご存知のように、三相モーターは単相および二相モーターよりも効率が高くなります。 固定子の回転磁界は、始動装置の助けを借りずに380ボルトのネットワークに接続された直後に現れます。 図2に示すように、スターとデルタの2つの一般的なモーター接続スキームがあります。
なお、スターと接続すると始動はスムーズになりますが、電動機の最大出力を達成することはできません。 デルタで接続すると、モーターは完全な銘板電力を出力します。これは、スターで接続した場合の1.5倍ですが、始動時には電流が非常に大きいため、ワイヤーの絶縁が損傷する可能性があります。 したがって、 強力なエンジン組み合わせたスターデルタ接続スキームを使用します。 始動はスター回路に従って行われ(始動電流は小さい)、電気モーターが動作状態に入った後、三角回路への自動または手動の切り替えが行われます(電力は1.5倍に増加し、公称値に近づきます)。 切り替えは、磁気スターター、開始時間リレー、またはバッチスイッチを使用して行われます。 380ボルトネットワークへの接続図を図3に示します。キーK1とK3を閉じた状態で、モーターをスター回路に従って接続し、キーK1とK2を閉じた状態で、エンジンを三角回路に従って接続します。 。
コンデンサ(380〜220)を介して単相ネットワークで三相モーターをオンにする
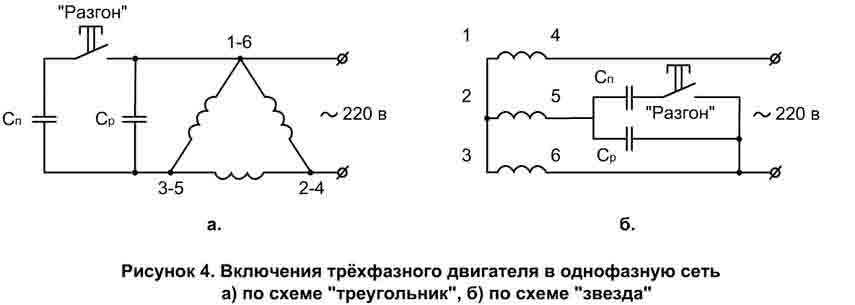
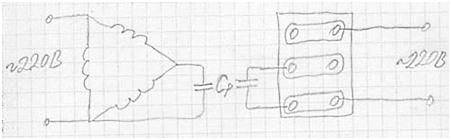
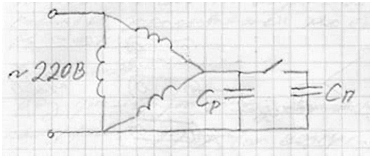
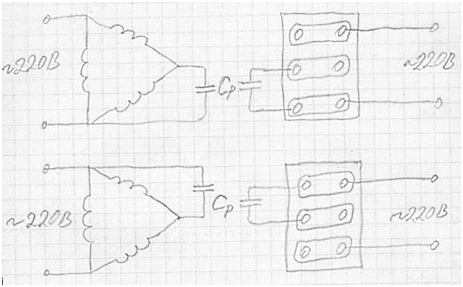
実際には、多くの場合、三相モーターを220ボルトのネットワークに接続する必要があります。 効率は50%(せいぜい70%まで)に低下しますが、そのような変更は正当化されます。 実際、モーターは2相として動作し始めます。 これは、位相シフトと加速に役立つ動作コンデンサと始動コンデンサを使用して、星または三角形のスキームに従って行われます(図4)。 加速ボタンは、シャフトが最大回転するまで押し続けてから離す必要があります。コンデンサは、式に従って計算されます。
星の場合Cp=2800 x I / U(uF);
三角形の場合Cp\u003d 4800 x I / U(uF);
Cn \ u003d Cp x(2 ... 3)。
Iがモーターによって消費される電流(手動で測定)である場合、Uは220Vに等しい主電源電圧です。
難しいのは、負荷がかかっているときとアイドル状態のときで、電流が巻線を流れる流れが異なることです。つまり、特定の負荷に対して容量を実験的に選択する必要があります。 容量が必要以上になると、モーターが過熱します。 電気モーターの電力に基づいて定格を概算するために、この表が使用されます。
電圧に関しては、コンデンサは少なくとも1.5倍大きくする必要があります。そうしないと、オンとオフを切り替えるときの電力サージによってコンデンサが故障する可能性があります。 必要な容量の金属紙コンデンサを入手するのが難しい場合は、ダイオードを使用した特別なスキームに従ってはんだ付けされた電解コンデンサを使用するものもあります。 ただし、爆発の際に電解液が目に入らないように注意してケースを閉める必要があります。 また、図5に示すように、回路を接続することにより、静電容量が半分になることも考慮する必要があります。 それにもかかわらず、強力な機械の操作のために、金属紙コンデンサを電解コンデンサに交換することは避けられるべきであることを理解しなければならない。
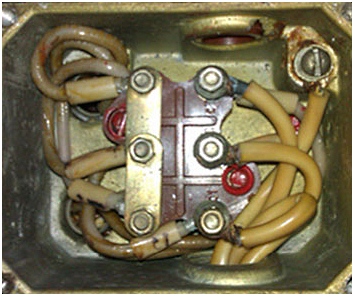
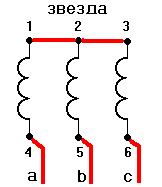
産業および産業でかなり頻繁に 家庭三相非同期モーターが使用されます。 このタイプのエンジンは非常に一般的であるため、エンジントラクションで動作する、私たちによく知られているデバイスのほとんどは、まさにそのようなもので動作します。 このエンジンは、可動ローターとステーター(それぞれ静止)の2つの主要部分のみで構成されています。 巻線は、120電気度に等しい特別な角距離で固定子コアに配置されます。 これらの巻線の始まりと終わりは、 接続箱、特別な端子に固定されています。 原則として、これらの結論は、それぞれ文字C-C1、C2、および最大C6でマークされます。 巻線は2種類接続可能 電気回路-「星」と「三角形」。 スター回路では、巻線の両端が相互に接続されています。巻線の始点は供給電圧に接続されています。 三角形のパターンは シリアル接続つまり、1つの巻線の始点が他の巻線の終点に接続され、以下同様に続きます。
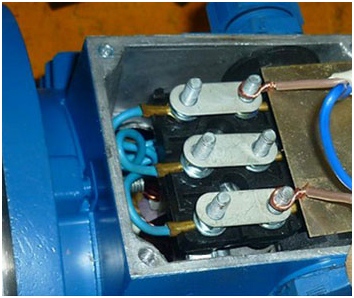
三角図によると、これが三相モーターの接続方法です。
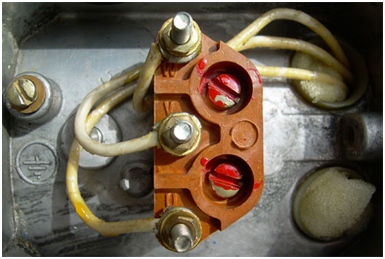
モータージャンクションボックスの内側、デルタ接続用のジャンパーの位置
通常、ジャンクションボックスでは、すべての接点出力とその端子が逆の順序でシフトされて配置されます。 つまり、C6はC1接点の反対側にあり、C4はC2端子の反対側にあります。
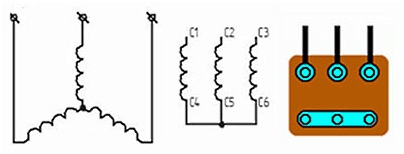
これは、接点がジャンクションボックスに配置される方法です
これは、「スター」スキームに従って、三相モーターが接続される方法です
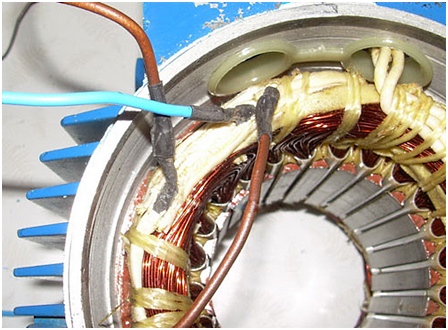
ライブ、スター接続されたジャンクションボックスは次のようになります
三相モーターをそれぞれ三相ネットワークに接続することにより、異なる時間に固定子巻線内に電流が流れ始め、それによって回転磁界が発生します。 この回転磁界は、磁気誘導によってモーターのローターを駆動し、その結果、モーターが回転し始めます。 三相モーターを単相ネットワークに接続すると、機械に十分なトルクがなくなり、単にオンになりません。
当然、直接実行しても起動しません。 ただし、「三相」をネットワークに接続する方法はいくつかあります。 最も簡単な方法の1つは、位相シフトコンデンサを3番目のピンとして接続することです。
自宅で三相モーターを接続する方法(単相ネットワーク)
単相ネットワークで動作する三相モーターの速度は、三相ネットワークで動作する場合とほぼ同じです。 ただし、この接続により、非同期モーターの電力が大幅に削減されます。 これは、ネットワーク自体の電力が不十分なためです(3相のものと比較して)。 いつ電力がどれだけ正確に失われるかを知るため 単相接続、接続図、非同期モーターの動作条件、およびコンデンサの静電容量の値を知る必要があります。 ただし、平均して、単相ネットワークに接続された各3相モーターは、それ自体の電力の最大30%または50%を失う可能性があります。
すべての三相モーターが単相ネットワークで正常に動作できるわけではないことに注意してください。 したがって、接続していて接続が正しいことは確かであるが、同時に完全に機能しなくなった場合でも、心配する必要はありません。 確率が高い場合、これはエンジン自体に問題があることを意味します。 もちろん、電力の損失に関係なく、大多数は正常に動作するはずです。 したがって、インデックスが「A」と「AOL」、「AO2」と「APN」の非同期モーターは、単相ネットワークでの作業で最も信頼性が高いことが証明されました。 それらのすべては、かご形回転子を持っています。
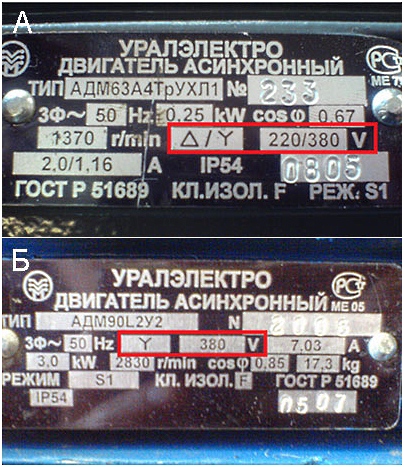
原則として、三相非同期モーターには、定格電圧に関して2つのカテゴリがあります。これは220/127Vおよび380/220Vネットワークで機能します。 低電圧のモーターは低電力で使用されるため、分布はほとんどありません。 したがって、より一般的なのは380/220Vカテゴリです。 「スター」に接続する場合はそれぞれ380Vの電圧が使用され、「トライアングル」回路では220Vの電圧が使用されます。 エンジンのパスポートとそのタグには、通常、動作電圧、主電源周波数、力率、巻線接続図の条件図、およびそれを変更する可能性を含む、すべての主要な性能特性と量が示されています。 。
これは、三相電気モーターのハウジングのタグがどのように見えるかです。
図「A」のタグは、前述のように、巻線を両方の回路に接続できることを示しています。 つまり、220Vの電圧の「三角形」と380Vの「星」の両方を接続できます。 このようなモーターを単相ネットワークに接続する場合は、「トライアングル」接続方式を使用することに注意してください。「スター」に接続すると、電力損失が発生するためです。大幅に高い。
図「B」のタグは、モーターがスター接続方式を使用していることを示しています。 これは、「ネズミ講」を含める可能性に対応しています。 このようなアイコンが表示された場合は、ジャンクションボックスに出力が3つしかないことを確認してください。 したがって、三角形の接続を確立するには、エンジンの内部に入り、残りの端を見つけて引き出す必要があります。 これは簡単ではないので、細心の注意を払ってください。
重要点! モータータグが220/127Vの形式で動作電圧を示している場合、220Vの動作電圧で単相ネットワークに接続すると、スター回路でのみ可能であり、それ以上は不可能であることに注意してください。 「三角形」の回路を備えたエンジンを220Vネットワークに接続しようとすると、単に燃え尽きてしまいます。
巻線の始まりと終わりを理解する方法は?
三相モーターを家庭用ネットワークに接続する際の最も紛らわしい問題の1つは、ジャンクションボックスに入るワイヤーで発生する混乱です。 さらに、場合によっては、ボックスが欠落している可能性があり、あなた自身がどこでどのワイヤーを把握する必要があります。
最も単純なケースは、380/220Vのモーター動作電圧で巻線が「三角形」回路に接続されているケースです。 したがって、開始図に従って、ジャンクションボックス内の動作コンデンサと開始コンデンサを端子に接続することによって、ネットワークからの導線を接続するだけで済みます。 モーター接続回路がスターに閉じているが、デルタに切り替えることができる場合は、接点ジャンパーを使用して回路を変更することにより、これを利用する必要があります。
さて、すべての巻線の始まりと終わりの定義についてです。 6本のワイヤーがマーキングなしでジャンクションボックスに単に突き出ている場合、それは非常に困難です。 この場合、どちらの巻線が始点で、どちらが終点であるかを理解することは困難です。 したがって、少し緊張してこの問題を解決する必要があります。 エンジンで何かをする前に、エンジンのメーカーについてインターネットをチェックしてください。 おそらく、既存の配線を解読できるいくつかのドキュメントがネットワーク上にあります。 ただし、有用な情報が見つからなかった場合は、次のように行動します
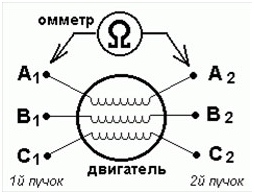
同じ巻線に関係するワイヤのペアを決定します。
そして、どちらの結論が始まりで、どちらが終わりかを判断します。
ワイヤのペアの決定は、テスターの助けを借りて「ダイヤル」することによって実行されます(抵抗測定モードが設定されています)。 そのようなデバイスが手元にない場合は、「祖父」の方法を使用し、電球とバッテリーを使用して巻線の端の所有権を判断できます。 ランプが点灯する(またはデバイスが抵抗の存在を示す)場合、これは2本のワイヤが同じ巻線に属していることを意味します。したがって、巻線リードの残りのペアも決定されます(下の図では、これが図に示されています)。
2番目のタスクでは、どの結論が始まりで、どちらが終わりであるかを確認する必要があります。 これを行うには、バッテリーとポインター電圧計を用意する必要があります(これには電子機器は機能しません)。 次に、下の図に従って、巻線の開始と終了を決定します。
したがって、バッテリーは1つの巻線の端に接続されます(しかし、図のように)、そして巻線の端までの既存の電圧計を接続します。 巻線のバッテリー線で接点が切れたときしかし、電圧計ポインタの、いずれかの側に逸脱する必要があります。 どちらかを覚えて、巻線に対して同じアクションを実行しますからそれに電圧計を接続することによって。 次に、巻線の電圧計の針を確認しますから巻線と同じ方向にずれているの。 これは、極性を変更する(端を変更する)ことで実現できますC1と C2)。 巻線も同様にチェックします。しかし。 その後、バッテリーはに接続されますからまた の、および電圧計は、それぞれ、しかし.
したがって、すべての巻線を「鳴らした」後、ある程度の規則性を得る必要があります。 巻線のバッテリーの接点を壊すと、他の2つは、同じ方向の電圧計の針の偏差を示すはずです(これは同じ極性を示します)。 その後、一方では結論(始まり)(A1、B1、C1)に、他方では結論(終わり)にマークを付けることが残っています。 最終段階で、端を適切な「星」または「三角形」のパターンに接続します。
巻線の欠けている端を取り除く方法は?
このケースはおそらく最も難しいケースの1つです。 したがって、「スター」に接続されたモーターは「デルタ」に切り替わりません。 実際には、ジャンクションボックスを開くと、3つの出力(C1、C2、およびC3)のみが表示されます。 残りの3つ(C4、C5、C6)はエンジン内部から取り出す必要があります。 下の図はまさにそのような場合を示しています。
問題のケースのモータータグ
そして、これはターミナルボックスの内部がどのように見えるかです
まず、ステーターに自由にアクセスできるように、エンジンを分解する必要があります。 これを行うには、ボルトで固定されているエンジンのエンドカバーを取り外し、その可動部分であるローターを取り外す必要があります。 次に、巻線の残りの端をはんだ付けする場所を見つけて、絶縁体からそれをきれいにする必要があります。 その後、リード線の端を外し、柔軟な絶縁体で事前に準備されたより線をはんだ付けします。 さらにはんだ付け箇所を絶縁し、固定子巻線に強い糸でワイヤーを固定します。 最終的に、追加のはんだ付けされたワイヤがジャンクションボックスに出力されます。
ここで、上記の方法で巻線の開始と終了を決定し、利用可能なすべての結論C1、C2などを指定する必要があります。 すべてのワイヤを識別したら、安全に三角形の接続を行うことができます。 このようなアクションには、特定の経験とスキルが必要であることに注意してください。 つまり、これについて複雑なことは何もありませんが、実際には、固定子内部のワイヤのスパイクで混乱し、巻線を短絡する可能性があります(たとえば)。 したがって、デルタ接続が特に必要ない場合は、接続をそのまま、つまり「スター」のままにしておくことをお勧めします。
三相モーターステーター
追加のワイヤーをはんだ付けする
このようにして、ワイヤーはしっかりとねじ込まれます
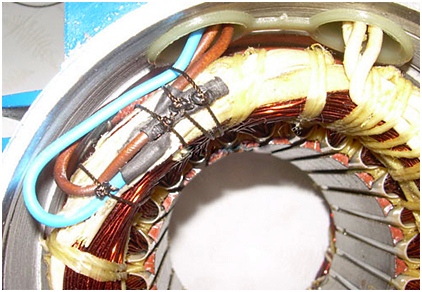
ジャンクションボックス内の導体の結論
「三角形」回路で導体を接続する
三相モーターを家庭用ネットワークに接続するときに使用されるスキーム
三角形のパターン。
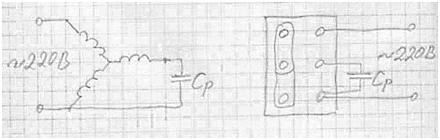
この場合の三相モーターの出力電力は他のスキームよりもいくらか大きくなるため、このスキームは家庭用ネットワークに最も適切で適切です。 したがって、「三角形」接続の電力は、公称値の70%になる可能性があります。 エンジン出力。 ジャンクションボックスでは、次のようになります。2つの接点がネットワークに接続され、3番目の接点が動作コンデンサCpに接続され、次に任意のネットワーク接点に接続されます。
これが図が紙に描かれる方法です
そして、これは実際にどのように見えるかです
起動
三相モーターの始動 アイドリング実行コンデンサを使用している可能性があります。 ただし、少しでも負荷がかかると起動しない場合や、電源が入って低速で動作しない場合があります。 したがって、そのような場合、追加の機器が使用されます。 始動コンデンサ Sp。 コンデンサの必要な静電容量を決定するための計算は、以下にあります。 参考までに、このようなコンデンサ(他の場合はコンデンサのグループ)は、エンジンを始動するためだけに機能します。 その結果、それらの動作時間は非常に短く、通常はミリ秒ですが、最大2秒に達する可能性があります。 このような短期間で、エンジンは必要なパワーを得る時間が必要です。
始動コンデンサSpを備えた回路
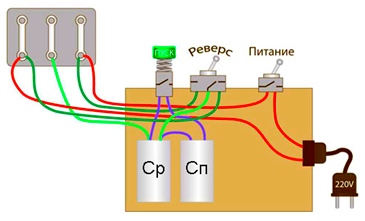
エンジンをより便利に操作するために、始動および操作回路にスイッチを追加することができます。 これは、スタートボタンを押すと1対の接点が閉じるという単純な原理で機能します。 「停止」ボタンが押されて接点が開くまで、回路全体がこのモードで動作します。
ソ連製のスイッチ
リバースの適用
一方向または別の方向への回転子の回転は、3番目の巻線が接続されている相によって異なります。
逆回路
したがって、1次巻線と2次巻線の接点に接続されている3次巻線にスイッチ(タンブラー)を備えた追加のコンデンサを接続することにより、三相電気モーターの回転子の回転方向を変えることができます。 以下に、上記の3つの方法すべてを使用した図を明確に示します。これにより、3相モーターでの作業がより便利になります。
スターコネクション
この方式は、巻線が220 / 127Vの電圧で動作する場合に、「三相」を家庭用ネットワークに接続するときに使用されます。
三相電気モーター「スター」の接続
コンデンサに必要な静電容量の計算。 そのため、モーター接続図や他の多くのパラメーターに基づいて、動作中のコンデンサーの静電容量の計算が行われます。 スター接続の場合、計算は次のように実行されます。
水=2800∙I / U;
巻線を三角形で接続し、次のように作業容量を計算します。
Cp=4800∙I/U;
ここで、コンデンサの動作容量はCpで表され、マイクロファラッドで測定されます。私とUそれぞれ電流と電圧です。 ここでU\ u003d 220V、それ以外の場合は、次の式で計算します。
私= P /(1.73∙U∙n∙cosϕ);
P-エンジンの出力を示します。
N-「三相」の効率。
Cosϕは力率です。
1.73-線形電流と相電流の関係を示します。
効率と力率の値は、モータータグに記載されています。 原則として、これらの値は0.8〜0.9の範囲でおおよそ変動します。
実際には、動作中のコンデンサの静電容量の値は、次の式に従って計算できることが示されています。C=70∙ Pn; どこ 定格出力。 この式は、巻線を「デルタ」に接続するときに一貫しており、それに応じて、100ワットごとに約7マイクロファラッドの静電容量が必要になります。 電気モーターの安定した動作は、コンデンサーがどれだけ正しく選択されているかに依存します。 容量を必要以上に高く選択すると、エンジンが過熱します。 開始容量の場合必要以上に少ないことが判明したため、エンジン出力はやや過小評価されます。 コンデンサは選択方法で選択できます。 したがって、小さなコンデンサから始めて、より強力なコンデンサに移ります。 最適な選択。 ネットワークと動作中のコンデンサの電流を測定できる場合は、最も正確なコンデンサを選択する機会があります。 この測定は、エンジンの動作モードで実行する必要があります。
始動能力は、十分な始動トルクを生成するための要件に基づいて計算されます。 始動コンデンサの静電容量と始動容量の値を混同しないでください。 たとえば、上の図では、開始容量は2つの容量CpとSpの合計です。
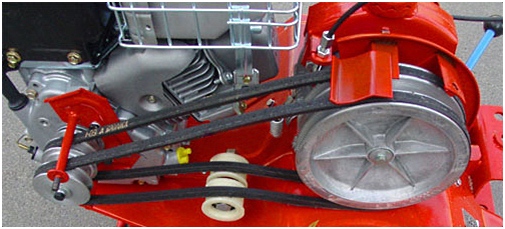
電気モーターをアイドル状態で使用する場合は、始動容量を作動容量と見なすことができ、さらに始動コンデンサーは不要になります。 このような場合、スキームは大幅に簡素化され、安価になります。このような対策は、負荷を切り離すのに役立ち、たとえばベルトドライブを緩めたり、そのための圧力ローラーを作成したりするなど、エンジンの位置をすばやく便利に変更することができます。
ウォークビハインドトラクターのVベルトトランスミッションの例
エンジンを始動するには、始動にのみ必要な追加の静電容量Spが必要です。 切断容量を増やすと、始動トルクが増加し、ある値で始動トルクがピーク値に達します。 ただし、容量をさらに増やすと、始動トルクが低下するだけなので、これを考慮する必要があります。
公称負荷に近い負荷で電気モーターを始動するためのすべての計算と条件に基づいて、始動容量の値は、動作時の1倍または3倍を超える必要があります。 たとえば、動作中のコンデンサの静電容量が80マイクロファラッドの場合、開始コンデンサの静電容量は80〜160マイクロファラッドになります。 これにより、160〜240 uFの開始容量(前述のようにCpとCnの合計)が加算されます。 ただし、起動時の負荷が小さい場合は、完全に存在しないとは言えないまでも、起動コンデンサの容量はやや少なくなります。 エンジンを始動するために動作するコンデンサは、実際にはミリ秒単位で動作するため、長時間使用され、原則として、予算モデルで十分です。
最良のオプションは、1つのコンデンサではなく、コンデンサブリッジに結合されたグループを使用することです。 これは、グループを接続することにより、コンデンサを切断または接続することにより、必要な静電容量をより正確に調整できるという意味で、より便利です。 ブリッジを形成する小さなコンデンサは、このような接続で静電容量が調整されるため、並列に接続されます。Ctot = C1 + C2 + C3 +…+Cn.
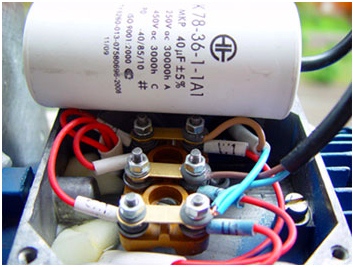
これは、並列接続がどのように見えるかです
金属化紙コンデンサは動作コンデンサとして機能し、MBGO、K78-17、BGTなどのフィルムコンデンサも優れています。 許容値の電圧は、電気モーターの動作中に主電源電圧を少なくとも1.5〜2倍超える必要があります。
したがって、三相モーターを単相ネットワークに接続するには、注意深い数学的分析と電気機器の経験が必要です。
電気についての詳細:
三相非同期モーターは、固定子と回転子の2つの部分で構成されるデバイスであり、エアギャップによって分離されており、相互に機械的な接続はありません。
固定子には3つの巻線があり、特殊な電磁鋼のプレートから組み立てられた特殊な磁気回路に巻かれています。 巻線は固定子のスロットに巻かれ、互いに120度の角度で配置されています。
ローターは、換気用の羽根車を備えたベアリングをベースにした構造です。 電気駆動の目的で、ローターは、ギアボックスまたは他の機械的動力伝達システムのいずれかを介して、機構に直接結合することができる。 非同期機のローターには、次の2つのタイプがあります。
かご形回転子は、両端がリングで接続された導体のシステムです。 リスの輪に似た空間構造が形成されています。 電流は回転子に誘導され、それが固定子の磁場と相互作用する独自の磁場を生成します。 これによりローターが駆動されます。
巨大な回転子は、電流が同時に誘導され、磁気回路である強磁性合金で作られた一体構造です。 巨大なローターに渦電流が発生するため、ローターの駆動力である磁場の相互作用が発生します。
三相非同期モーターの主な駆動力は回転磁界です。これは、第一に三相電圧によって発生し、第二に固定子巻線の相対位置によって発生します。 その影響下で、電流が回転子に発生し、固定子フィールドと相互作用するフィールドを作成します。
非同期モーターは、ローターの速度が磁場の速度より遅れているために呼び出されます。ローターは常に磁場に「追いつく」ことを試みますが、その周波数は常に低くなります。
非同期モーターの主な利点
急速な摩耗と追加の摩擦を生み出すコレクターグループがないために達成される設計の単純さ。
非同期モーターに電力を供給するために、追加の変換は必要ありません。産業用三相ネットワークから直接電力を供給することができます。
部品点数が比較的少ないため、非同期モーターは信頼性が高く、耐用年数が長く、メンテナンスが容易です。 メンテナンスと修理します。
もちろん、三相機には欠点があります。
非同期モーターの始動トルクは非常に低いため、範囲が制限されます。
始動時に、これらのモーターは消費します 大電流起動時に、特定の電源システムで許可されている値を超える場合があります。
非同期モーターは多くの無効電力を消費しますが、モーターの機械的電力は増加しません。
非同期モーターを380ボルトのネットワークに接続するためのさまざまなスキーム
エンジンを機能させるために、いくつかの異なる接続スキームがあり、それらの中で最も使用されるのはスターとデルタです。
三相スターモーターを正しく接続する方法
電気モータープレートは、Y記号の形で「スター」方式を使用して接続する可能性を示し、別の方法で接続できるかどうかを示すこともできます。 この方式による接続は、すべての巻線の接続ポイントに接続されているニュートラルを使用することができます。
このアプローチにより、4極回路ブレーカーを使用して電気モーターを過負荷から効果的に保護できます。
スター接続では、380ボルトのネットワークに適合した電気モーターを開発できません 全力個々の巻線の電圧は220ボルトになるためです。 ただし、このような接続により過電流を防ぐことができ、電気モーターの始動がスムーズに行われます。
端子箱には、モーターをスター接続するとすぐに表示されます。 巻線の3つの端子の間にジャンパーがある場合、これはこの特定の方式が使用されていることを明確に示しています。 他のすべての場合、異なるスキームが適用されます。
「ネズミ講」に従って接続を実行します
三相モーターが最大の銘板電力を発揮するために、「三角形」と呼ばれる接続が使用されます。 この場合、各巻線の端は次の巻線の始点に接続され、実際には次の巻線が形成されます。 回路図三角形。
巻線リードは次のように接続されます。C4はC2に接続され、C5はC3に接続され、C6はC1に接続されます。 新しいマーキングでは、次のようになります。U2はV1に接続し、V2はW1に接続し、W2はU1に接続します。
三相ネットワークでは、巻線の端子間には 線間電圧 380ボルトで、ニュートラル(作業ゼロ)への接続は必要ありません。 このような方式には、大きな突入電流が発生し、配線に耐えられないという特徴もあります。
実際には、起動および加速段階で「スター」接続が使用される場合、複合接続が使用されることがあり、動作モードでは、特殊なコンタクタが巻線を「トライアングル」回路に切り替えます。
端子ボックスでは、デルタ接続は巻線端子間に3つのジャンパーが存在することによって決定されます。 モータープレートでは、デルタとの接続の可能性が記号?で示され、スターとデルタの接続で発生する電力も示されます。
三相非同期モーターは 重要な部分その明らかな利点のために電気の消費者の間で。
可逆および非可逆磁気スターター回路
磁気スターターとは何ですか-これはのために設計されたスイッチングデバイスです 自動スタート電気ボイラー、電気ヒーター、電気モーターなどの電力消費者の切断。
磁気スターターはあなたが実行することを可能にします リモコン、コントロールパネルから離れた場所で消費者の電源をオン/オフします。 最も一般的なアプリケーション 磁気スターター非同期モーターを受け取り、それを利用して、モーターを始動、停止、および逆転させます(シャフトの回転方向を変更します)。
別の磁気スターターを使用して、低電力接点をアンロードします。 たとえば、自宅にある簡単なスイッチを考えてみましょう。これは、10アンペア以下の負荷をオン/オフするように設計されており、電力を決定します。電流に電圧10 * 220 \ u003d2200Wを掛けます。 これは、このスイッチを使用して、22個以下の100W電球をオンにできることを意味します。
連絡先をアンロードしましょう シンプルなスイッチ電源接点が40アンペアの電流をオン/オフするように設計されている第3の大きさの磁気スターターを使用して、オンおよびオフできる電力:40 * 220 \u003d8800W。 その結果、スイッチを1回クリックするだけで、磁気スターターの接点を介して街路照明路全体のオンとオフを切り替えることができます。
3等の磁気スターターは、動作時に200Wを消費する電磁コイルを使用して制御され、アクティブ状態では25Wしか消費しないため、200/380 =0.52Aになります。これが電流です。スターターが機能し、主電源回路をオンにするために必要です。 ここで、磁気スターターを制御する小さなコンパクトなスイッチを配置して、電源接点でオンとオフを切り替えることができると想像してください。 ハイパワー.
磁気スターターには、人を損傷から保護するために、380V、220V、および36Vの電圧用の制御コイルもあります 電気ショック。 旋盤には、36Vコイルの磁気スターターが取り付けられています。 これは、旋盤のコントロールパネルが絶縁破壊の場合に安全な電圧を持つために必要です。
なぜ磁気スターターを備えたサーマルリレーが必要なのですか。 サーマルリレーは、モーターを過負荷や開相運転から保護します。 オープンフェーズモードとは-これは、電気モーターの動作中に3つのフェーズの1つが消えた場合です。
単相モードの理由:ヒューズリンクが一相で焼損した、端子の接点が焼損した、または磁気スターターの端子台のネジが緩んで脱落した 相線振動から 悪い接触スターターの電源接点に。
モーターが過負荷になるか、開相モードで動作している場合、サーマルリレーを流れる電流が増加します。 サーマルリレーでは、導電性のバイメタルプレートが加熱され、熱の影響で曲がり、サーマルリレーの接点の開口部に機械的に作用して、磁気スターターコイルへの電源をオフにし、モーターをオフにします。スターターの手段。
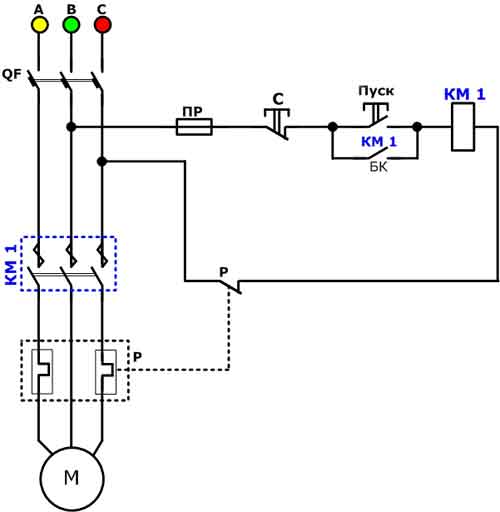
磁気スターターを介して非同期モーターを接続するSEMA。
スキームは次のもので構成されます。
QFから-サーキットブレーカー; KM1-磁気スターター; P-サーマルリレー; M-非同期モーター; PR-ヒューズ; コントロールボタン(C-stop、Start)。 ダイナミクスにおける回路の動作を考えてみましょう。
電源QF-自動スイッチをオンにし、通常開いている接点で「開始」ボタンを押して、コイルKM1-磁気スターターに電圧を供給します。KM1-磁気スターターが機能し、通常は開いている状態で、電源接点がモーターに電圧を供給します。 エンジンが作動するために「スタート」ボタンを押さないためには、通常開いているブロック接点KM1(磁気スターター)でシャントする必要があります。
スターターがトリガーされると、ブロック接点が閉じ、「開始」ボタンを放すことができます。電流は接点ブロックを通ってKM1コイルに流れます。エンジンを停止し、「C-停止」ボタンを押すと、通常は閉じている接点が開き、KM1-コイルへの電圧供給が停止し、スターターコアはそれぞれスプリングの作用により元の位置に戻ります。通常の状態に戻り、エンジンを停止します。 サーマルリレー-「P」がトリガーされると、通常は閉じている接点「P」が開き、同じようにシャットダウンが発生します。
380Vコイルを備えた磁気スターターの非可逆回路。
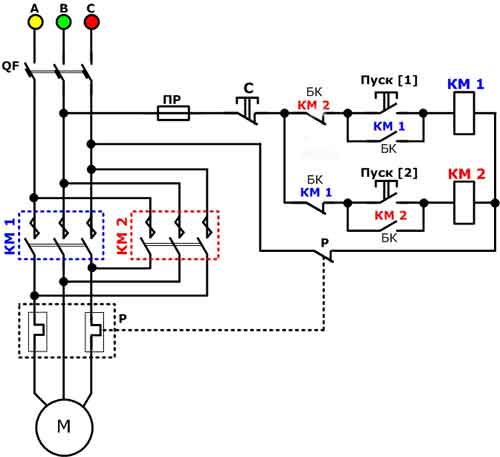
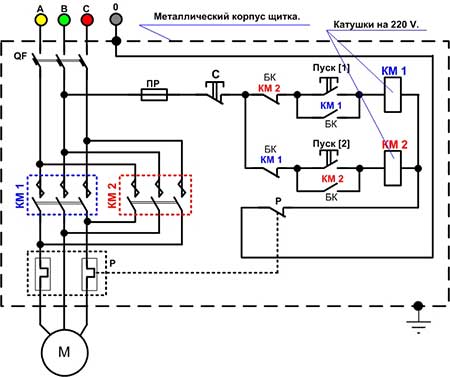
磁気スターターのリバーシブルスキーム。
回路は同じように構成されており、非反転回路の場合と同様に、追加されるのは反転ボタンと磁気スターターだけです。
回路の動作原理はもう少し複雑です。ダイナミクスで考えてみましょう。 回路に必要なのは、場所によっては2つのフェーズが逆転するため、エンジンが逆転することです。 この場合、最初のスターターが動作している場合に2番目のスターターをオンにできない、またはその逆のロックが必要です。 2つのスターターを同時にオンにすると、短絡が発生します- 短絡スターターの電源接点に。
QFをオンにします- サーキットブレーカ、「スタート」ボタンを押すと、KM1スターターコイルに電圧が印加され、スターターが作動します。 スタートボタン「スタート」がシャントされている間、電源接点はエンジンをオンにします。
2番目のスターター(KM2)のブロックは、通常は閉じているKM1-ブロック接点によって実行されます。 KM1-スターターがトリガーされると、KM1が開きます-ブロック接点により、2番目のKM2-磁気スターターのコイルの準備されたチェーンが開きます。
エンジンを逆転させるには、エンジンをオフにする必要があります。 「C-stop」ボタンを押してエンジンを停止すると、動作中のコイルから電圧が除去されます。 スプリングの作用下にあるスターターとブロックの接点は元の位置に戻ります。
回路は逆回転の準備ができています。「スタート」ボタンを押し、コイルに電圧を印加します-KM2、スターター-KM2が作動し、反対回転でエンジンをオンにします。 「開始」ボタンはブロック接点(KM2)によってシャントされ、通常は閉じているブロック接点KM2が開いて、磁気スターターコイル(KM1)の準備をブロックします。
サーマルリレー-「P」がトリガーされると、通常は閉じている接点「P」が開き、同じようにシャットダウンが発生します。380Vコイルを備えた磁気スターターの反転回路。
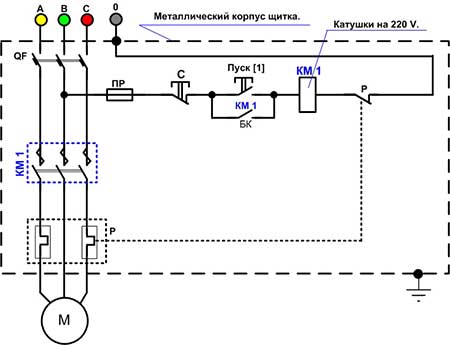
220Vコイルを使用した磁気スターター回路の動作原理は、380Vコイルを使用した場合と同じです。
220Vコイルを備えた磁気スターターの非可逆回路。
220Vコイルを備えた磁気スターターの反転回路。