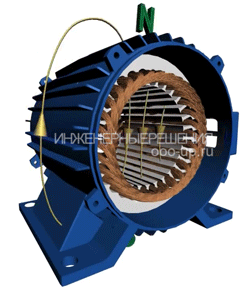
これは、固定子と回転子の2つの主要部分で構成されています。 固定子は固定部分、回転子は回転部分です。 ローターはステーターの内側に配置されます。 ローターとステーターの間にはエアギャップと呼ばれる小さな距離があり、通常は0.5〜2mmです。
固定子 誘導電動機
誘導電動機ローター
固定子本体と巻線付きのコアで構成されています。 固定子コアは、通常0.5 mmの厚さの薄いシートの工業用鋼で組み立てられ、絶縁ワニスでコーティングされています。 コアの積層設計は、回転磁界によるコアの再磁化中に発生する渦電流の大幅な削減に貢献します。 固定子巻線はコアの溝に配置されています。

非同期電動機のハウジングと固定子コア

非同期モーターの積層コアの設計
ローター巻線が短絡したコアとシャフトで構成されています。 ローターコアも積層設計になっています。 この場合、電流の周波数が低く、酸化膜が渦電流を制限するのに十分であるため、ローターシートにはニスが塗られていません。
動作原理。 回転磁界
三相巻線の動作原理は、三相電流ネットワークに接続されたときに、回転磁界を生成する三相巻線の能力に基づいています。
走る
やめる
誘導電動機の回転磁界
この界磁の回転周波数、または同期回転周波数は、交流電流f 1の周波数に正比例し、三相巻線の極対の数pに反比例します。
 ,
,
- ここで、n1-回転速度 磁場固定子、rpm、
- f 1-AC周波数、Hz、
- pは極のペアの数です
回転磁界の概念
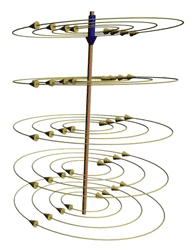
回転磁界の現象をよりよく理解するために、3ターンの単純化された三相巻線を考えてみましょう。 導体を流れる電流は、導体の周りに磁界を発生させます。 次の図は、特定の時点での三相交流によって生成されるフィールドを示しています。
走る
やめる
直線導体の磁場 直流
巻線によって生成される磁場
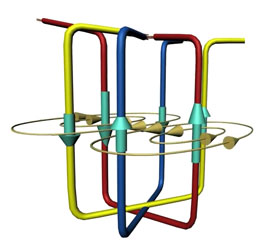
ACコンポーネントは時間の経過とともに変化し、その結果、ACコンポーネントが生成する磁場が変化します。 この場合、三相巻線の結果として生じる磁場は、同じ振幅を維持しながら、異なる方向を取ります。
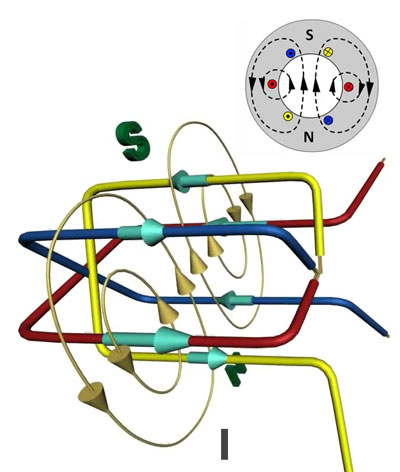
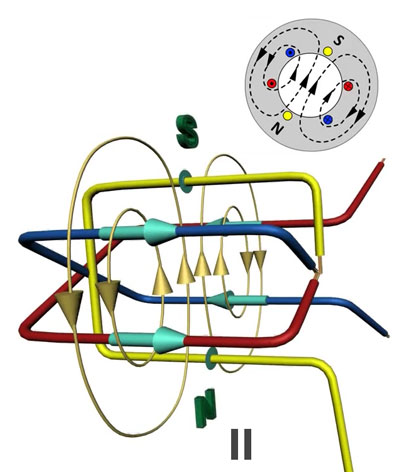
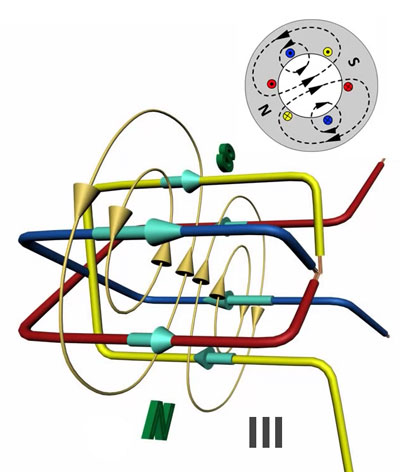
発生する磁場 三相電流異なる時間に
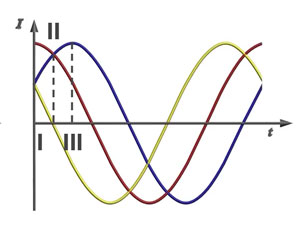
電気モーターのターンに流れる電流(シフト60°)
走る
やめる
閉ループでの回転磁界の作用
次に、回転磁界内に閉じた導体を配置しましょう。 磁場を変えることにより、導体に起電力(EMF)が発生します。 次に、EMFは導体に電流を発生させます。 したがって、磁場の中には電流のある閉じた導体があり、それに応じて力が作用し、それに応じて回路が回転し始めます。
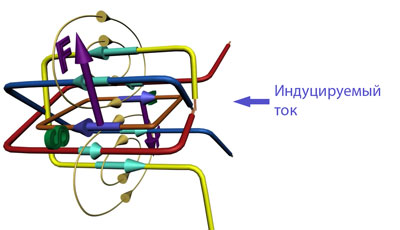
電流による閉じた導体への回転磁界の影響
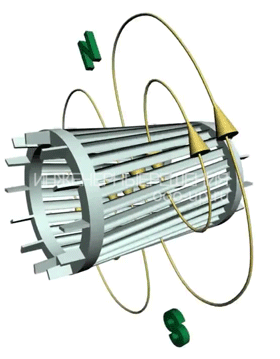
かご形回転子誘導電動機
この原則も機能します。 非同期モーター内に電流が流れるフレームの代わりに、設計がリスホイールに似たかご形ローターがあります。 かご形回転子は、両端がリングで短絡されたロッドで構成されています。

かご形三相檻ローターは、 非同期電気モーター(シャフトとコアなしで表示)
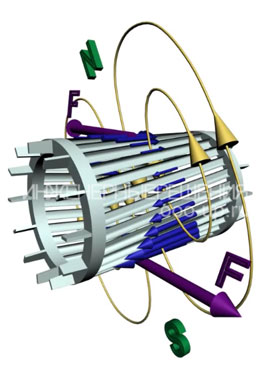
3相 交流電流、固定子巻線を通過して、回転磁界を生成します。 したがって、前述のように、ローターバーに電流が誘導され、その結果、ローターが回転し始めます。 下の図では、バーの誘導電流の違いを見ることができます。 これは、磁場に対する変化の大きさが、磁場に対するロッドの位置が異なるために、ロッドのペアごとに異なるという事実によるものです。 ロッドの電流の変化は時間とともに変化します。
走る
やめる
かご形回転子を貫通する回転磁界
また、ローターバーが回転軸に対して傾いていることに気付くかもしれません。 これは、EMFの高調波を低減し、モーメントのリップルを取り除くために行われます。 ロッドが回転軸に沿って方向付けられている場合、巻線の磁気抵抗が固定子の歯の磁気抵抗よりもはるかに高いため、ロッドに脈動磁場が発生します。
スリップ誘導モーター。 ローター速度
誘導電動機の特徴は、回転子の速度n2が固定子の磁場n1の同期速度よりも遅いことです。
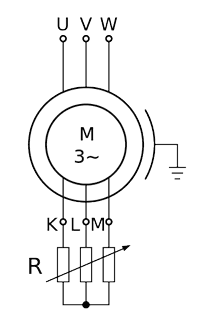
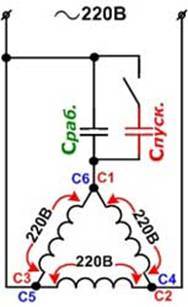
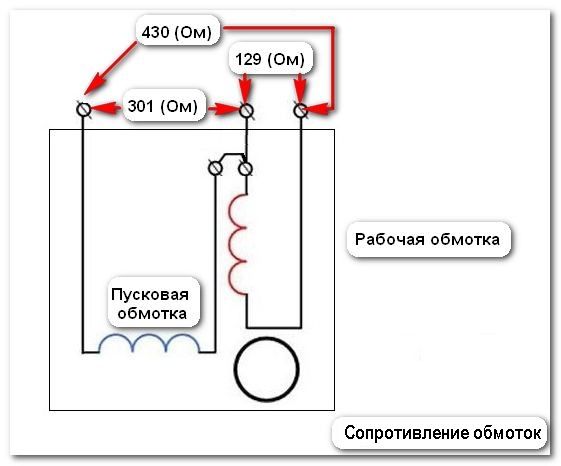
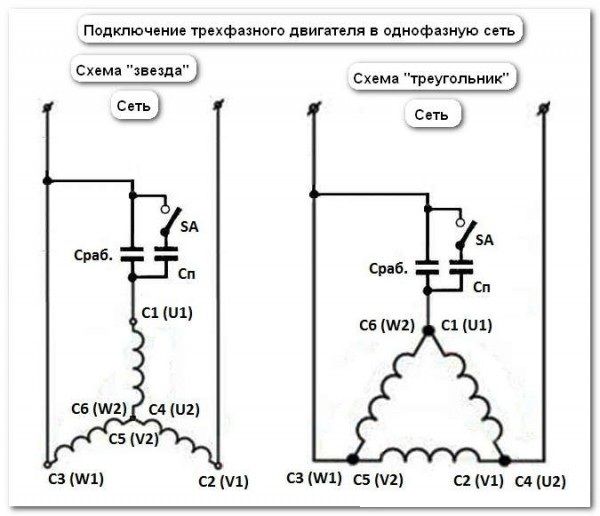
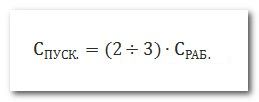
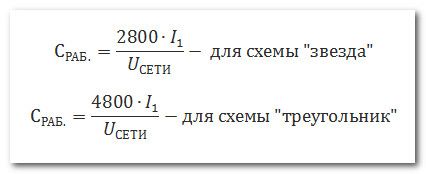
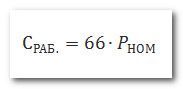
これは、回転数が等しくない場合にのみ、回転子巻線のロッドのEMFが誘導されるという事実によって説明されます。 回転子の速度が固定子の磁場の回転周波数と一致する場合を考えてみましょう。 この場合、ローターの相対磁場は一定であるため、ローターロッドにEMFは生成されず、したがって電流は発生しません。 これは、ローターに作用する力がゼロになることを意味します。 したがって、ローターは減速します。 その後、交番磁界が再びローターロッドに作用し、誘導電流と力が増加します。 実際には、回転子が固定子磁場の回転速度に達することはありません。 ローターは、同期速度よりわずかに遅い速度で回転します。 誘導電動機のスリップは、0から1、つまり0〜100%の範囲で変化します。 s〜0の場合、これは、モーターローターが実際に反作用モーメントを経験しないアイドリングモードに対応します。 s = 1の場合-短絡モード。モーターローターは静止しています(n 2 = 0)。 すべりはモーターシャフトの機械的負荷に依存し、モーターシャフトの成長とともに増加します。 モーターの定格負荷に対応するすべりを定格すべりといいます。 中小電力の非同期モーターの場合、定格スリップは8%から2%まで変化します。 回転子位置センサーによる非同期電動機の現場指向制御 フィールド指向の制御モーションパラメータ(速度とトルク)をスムーズかつ正確に制御できますが、同時に、その実装には、モーターローター磁束リンケージの方向とベクトルに関する情報が必要です。 ローター位置センサーなしの非同期モーターのフィールド指向制御 フェーズローターを備えたモーターは、ローター回路の始動レオスタットを使用して始動されます。 ワイヤーと液体抵抗器が使用されます。 金属レオスタット段付きで、あるステージから別のステージへの切り替えは、コントローラハンドルを使用して手動で実行されます。コントローラハンドルの重要な要素は、接点が取り付けられたシャフトであるか、コンタクタまたは電動コントローラを使用して自動的に実行されます。 液体抵抗器電極が省略された電解質を備えた容器です。 レオスタットの抵抗は、電極の浸漬深さを変えることによって調整されます。 効率を高め、ブラシの摩耗を減らすために、一部のADFRには、始動後にブラシを上げてリングを閉じる特別な装置(短絡メカニズム)が含まれています。 レオスタティック始動では、低い始動電流で高いトルクが得られるため、良好な始動特性が得られます。 現在、ADFRは、かご形回転子と周波数変換器を備えた非同期電気モーターの組み合わせに置き換えられています。 必要に応じて、三相非同期電動機を単相電源に接続できます。 エンジンのシャフトは回転しますが、同時に、もちろん、3つのフェーズで接続されたときに存在する力はありません。 固定子の回転磁界に加えて、3つの巻線の電磁場が重ね合わされます。 それらはシャフトにかかる力とトルクを決定します。 ただし、単相接続の場合、三相非同期モーターは、単相モーターの大型バージョンと見なすこともできます。 実際、その中には、実際には、1つの作動巻線と2つの始動巻線があります。 三相電源への定期的な接続は、「三角形」または「スター」のいずれかの巻線接続方式の1つを提供します。 したがって、巻線の電気モードは、「三角形」方式に従って接続されている場合、公称電圧として380Vの電圧を許容します。 単相電圧の場合、その値は220 Vです。これは、「三角形」方式に従ってオンにした場合よりも小さいため、巻線の絶縁と飽和の信頼性に関して、巻線の電気モードに対して安全です。コア。 しかし、電圧の低下は、電力とエンジンシャフトの電力の両方のレベルの低下につながります。 したがって、巻線の1つを単相電源に直接接続する必要があります。 残りの巻線も最大のリターンを与えるために、コンデンサを介して接続されたときに一緒に使用され、相電圧シフトが発生します。 その結果、「三角形」方式に従った巻線の接続が同じになりますが、コンデンサを備えた単相電気回路の場合です。 しかし、ローターの回転に必要な磁場の空間的な動きはコンデンサーによって生成されるため、その静電容量の値が重要になります。 三相モーターは、最大磁場を120度以内に動かすように設計されています。 また、コンデンサを使用すると、磁場の最大値の動きを90度以内でしか得ることができません。 そのため、エンジン始動時にコンデンサの容量が足りない場合があります。 始動トルクを大きくするには、コンデンサの静電容量を大きくする必要があります。 ただし、エンジンのローターを加速した後、このエンジンの動作モードでは追加容量が大きすぎることが判明する場合があり、値が小さいほどうまく機能します。 したがって、始動モードと定格モーター速度モードを最適化するために、2つのコンデンサーが使用されます。 1つは電気回路に恒久的に接続され、もう1つは電気モーターが始動したときにのみボタンを使用して接続されます。 三相非同期モーターを備えた電気回路のコンデンサーのもう1つの特徴は、巻線、相線、および中性線への接続です。 巻線と相線、または巻線と中性線のいずれかに接続されます。 これらの接続に応じて、電気モーターのローターの1つまたは別の回転方向が得られます。 したがって、電気回路にスイッチを1つ追加するだけで、エンジンシャフトの回転方向を制御できます。 単相電源で三相非同期モーターを確実に動作させるには、コンデンサを正しく選択する必要があります。 同時に、単相電気ネットワークの電圧の220 Vの値は条件付きの値であることに注意する必要があります。これは、実際には、電圧がゼロから220Vを超えて等しい振幅値に変化するためです。約310V、つまり1.42倍以上。 しかし、実際の電圧値はさらに高くなる可能性があります。 また、コンデンサには定格電圧があるため、主電源からの動作時の値は少し余裕を持って選択する必要があります。 公称電圧350Vのコンデンサを使用することをお勧めします。 相電圧が220V未満の三相電気ネットワーク用に設計された非同期モーターがある場合は、「三角形」回路の代わりに「スター」回路を使用する必要があります。 コンデンサーは、エンジンの出力に関連する他の静電容量値とともにこのオプションにも使用されます。 これはパスポートの値であり、電気モーターの付属文書に常に示され、通常はハウジング(銘板)にある金属ラベルに記載されています。 電力の大きさによって、公称負荷のエンジンの電流強度を簡単に判断できます。 これを行うには、ワット単位の電力を220で割ります。 結果の値は、「スター」スキームの場合は係数12.73で乗算され、「トライアングル」スキームの場合は係数24で乗算されます。 その結果、マイクロファラッド単位の静電容量が得られます。 エンジン始動時のコンデンサの静電容量は、2つのコンデンサから合計されます。 負荷のかかったエンジンを始動するために、経験的に追加のコンデンサが選択されます。 実験中は、充電されたコンデンサの取り扱いには細心の注意を払う必要があります。 さまざまなモデルの紙-金属コンデンサを使用することをお勧めしますので、それらは長期間充電を保持します。 したがって、コンデンサの放電を加速するために、3〜5kΩの抵抗を持つ抵抗器をコンデンサの端子にはんだ付けすることをお勧めします。 380〜220ボルトのエンジンを接続することは常に非標準的な解決策であることを覚えておくことが重要です。 あなたはいつも実験に行かなければなりません。 セキュリティ対策を厳守して実施する必要があります。 三相電気モーター単相220ボルトよりも高い効率があります。 家やガレージに380ボルトの入力がある場合は、必ずコンプレッサーまたは三相電気モーターを備えた機械を購入してください。 これにより、デバイスのより安定した経済的な動作が保証されます。 380ボルトの電源に接続した直後に固定子に回転磁界が発生するため、モーターを始動するために、さまざまな始動装置や巻線は必要ありません。 三相接続図磁気スターターを使用したモーター私は過去の記事で詳細に説明しました:""と""。 に従ってコンデンサを使用して、三相モーターを220ボルトのネットワークに接続することもできます。 しかし、その作業のパワーと効率は大幅に低下します。 誘導電動機の固定子 380 Vでは、三角形または星形で相互に接続された3つの別々の巻線があり、3つの逆相が3つのビームまたはピークに接続されています。 あなたは考慮しなければなりませんスターと接続するとスタートはスムーズになりますが、フルパワーを実現するにはモーターを三角形に接続する必要があります。 この場合、電力は1.5倍に増加しますが、強力または中程度のモーターを始動するときの電流は非常に高くなり、巻線の絶縁を損傷する可能性さえあります。 接続する前に電気モーター、パスポートとネームプレートでその特性を読んでください。 これは、400/690電圧ネットワークで動作するように設計された西ヨーロッパ生産の3相電気モーターを接続する場合に特に重要です。 そのような標識の例を以下に示します。 このようなモーターは、「三角形」方式に従ってのみ電気ネットワークに接続されます。 しかし、多くの設置業者は「スター」で国内の設置業者と同様にそれらを接続し、電気モーターは特に負荷がかかるとすぐに燃え尽きます。 練習中 国内生産のすべての電気モーター 380ボルトは星で結ばれています。 写真の例。 いくつかの 私たちの電気モーターはたった3つで出てきます巻線のある固定子の端-これは、スターがエンジン内ですでに組み立てられていることを意味します。 それらに接続する必要があるのは3つのフェーズだけです。 そして、星を組み立てるためには、両端が必要です。各巻線または6本のリード線です。 図の巻線の端の番号は、左から右に向かっています。 番号4、5、6には、3相A-B-Cが主電源から接続されています。 三相電気モーターを星で接続すると、固定子巻線の始点が一点で接続され、380ボルト電源の3相が巻線の端に接続されます。 三角形で接続した場合固定子巻線は直列に接続されています。 実際には、ある巻線の端を次の巻線の始点に接続する必要があります。 三相は、相互の接続の3つのポイントに接続されています。 モーター接続用起動時のかなりまれなスタースキームによると、その後、動作モードで動作するためにトライアングルスキームに転送されます。 したがって、最大電力を絞り出すことはできますが、回転方向を逆にしたり変更したりすることなく、かなり複雑な回路になります。 回路を動作させるには、3つのスターターが必要です。電源は、一方の側で最初のK1に接続され、もう一方の側で固定子巻線の端に接続されます。 それらの始まりはK2とK3に関連しています。 K2スターターから、巻線の始点は三角形のスキームに従って他の相にそれぞれ接続されます。 K3をONにすると、3相すべてが短絡し、スター動作方式が得られます。 注意、磁気スターターK2とK3を同時にオンにしないでください。オンにしないと、相間短絡の発生により回路ブレーカーの緊急シャットダウンが発生します。 したがって、それらの間に電気的インターロックが作成されます。一方がオンになると、もう一方の制御回路が接点によって開かれます。 スキームは次のように機能します。スターターK1がオンになると、タイムリレーがK3をオンにし、スター方式に従ってエンジンが始動します。 エンジンを完全に始動するのに十分な所定の期間の後、タイムリレーはスターターK3をオフにし、K2をオンにします。 モーターは、三角方式に従って巻線の動作に切り替わります。 シャットダウンが発生しますスターターK1。 再起動すると、すべてが再び繰り返されます。 同様の材料。 洗濯機、掃除機、電気ドリルの仕組みが完全に機能しなくなることがよくあります。そして、絶望的に時代遅れの家電製品を修理するよりも、新しい家電製品を購入する方が有益です。 これらの機器から残ったスペアパーツの山の中で、原則として最も価値のある要素は、220Vネットワークに接続することで有効に活用できる電気モーターです。 このような電気機器では、本格的な三相モーターはめったに見つかりません。単相コレクターまたは非同期電気モーターが存在する可能性が高く、これらは、ポンプ、コンプレッサー、ファン、グラインダー、ミニマシン、野菜カッター、芝刈り機など。 この記事では、タイプに応じて、単相電気モーターを220Vネットワークに接続する方法について説明します。 洗濯機や電気ドリルに見られるコレクターモーターでは、固定子と回転子に巻線があります。 コレクターモーター 回転子巻線はフレームの形で巻かれ、特別な溝に配置され、グラファイトブラシの形のコレクターリードと接点を使用して切り替えられます。 整流子モーターローター 回転子装置は、いつでも1つのフレームのみが通電されるように設計されており、その磁場は固定子巻線の磁場に垂直です。 極磁極の電磁相互作用は、コンパスの針のように、その磁場の方向が固定子の磁場と一致するように回転子を回転させる傾向があります。 しかし、ローターが一定の角度で回転するとすぐに、フレームの接点がブラシと接触しなくなり、次の巻線がオンになり、このプロセスが繰り返されて、連続的なトルクが発生します。 コレクター電気モーターの回路は、交流電圧の位相に関係なく、回転子の固定子巻線と回転子フレームの電流の方向が常に一致するように設計されています。 電流の方向が一致するため、結果として生じる磁場は常に垂直になり、シャフトの回転モーメントが発生します。 したがって、固定子巻線と回転子巻線を直列に接続するために、モーター端子にジャンパーを取り付けることが非常に重要です。 固定子巻線または回転子巻線のリード線を交換することにより、モーターシャフトの回転方向を変更できます。 接続図 全体像を完成させるには、電流の経路を追跡する必要があります。コレクターブラシの端子の1つが220 Vネットワークに接続されています(フェーズとしましょうが、問題ではありません)。 別のブラシの出力は、ジャンパーを使用して固定子の1つの出力に接続する必要があります。 固定子からの残りの出力は220Vネットワーク(ゼロ)に接続され、回路を閉じます。 コレクターモーターとは異なり、かご形回転子が静止している単相非同期電気モーターでは、 非同期モーター装置 コイルの電磁場と相互作用する磁場を生成する電流が誘導されると、発生する力(M、-M)のベクトルが互いに釣り合います。 これは、ネットワークに接続されている場合、モーターシャフトが回転しないことを意味し、モーターシャフトを始動するには初期トルクSが必要です。 手でシャフトを回転させて主電源電圧を印加すると、エンジンが速度を上げます。 多くの人が砥石を使ってこれを行いますが、野菜カッターや芝刈り機の回転ナイフを回転させる必要がある場合、この方法は完全に受け入れられません。 三相電気モーターでは、巻線の配置と三相ネットワークの相の変位を使用してトルクが建設的に設定されるため、単相モーターでは、追加の始動巻線が始動に使用されます。ローター変位のトルクが発生します。 接続図1 220 Vの電圧の正弦波に対する追加巻線の電流の位相シフトは、コンデンサを使用して作成されます。 接続図2 非同期単相電気モーターのネットワークへの接続。 巻線端子 ただし、回路がどこかで失われた場合は、抵抗を測定して比較することにより、動作中および開始時の巻線を決定する必要があります。メインの抵抗の場合は、抵抗を小さくする必要があります。 これを行うには、マルチメータを使用し、測定範囲をオームで設定し、リード間の抵抗を1つずつ測定する必要があります。 始動および作動巻線の決定 これらの巻線には共通の結論があることが多いため、経験的に決定されます。特定の巻線から測定された抵抗の合計は、直列に接続された巻線の合計抵抗に対応している必要があります。 巻線の動作と開始 作動巻線は220Vの電圧に直接接続され、始動巻線はコンデンサと直列に接続されます。 巻線がモーターの内部に接続されている場合、そのような回路では回転方向を変更できません。 2つの巻線からの4本のワイヤがモーターから出ている場合、回転方向は、それらを共通のコンセントに接続するためのリード線の選択によって異なります。 モーター回転の選択 同一の巻線を持つ電気モーターがあります-それらは二相と呼ばれます。 単相および二相モーターは始動が必要なため、このような電気モーターはコンデンサーモーターと呼ばれます。 コンデンサモーターの動作にはいくつかのモードがあります。 エンジンの始動が激しい場合に適用されます。 動作コンデンサの容量は、最初のコンデンサの公称値(70μF/ 1kW)の2〜3分の1です。 計算式は複雑であるため、上記の比率に基づいて容量を選択するのが通例です。 実際には、電気モーターを接続することにより、その動作と加熱を監視する必要があります。 コンデンサが作動しているモードでエンジンが著しく熱くなる場合は、その静電容量を減らす必要があります。 動作電圧が450V以上のコンデンサを選択する必要があります。 始動コンデンサを使用してエンジンを始動するには、コントロールボタンを使用して手動で始動します。 または、2つのコンタクタを備えた回路で、そのうちの1つ(始動)にはセルフピックアップがなく、閉じた押しボタン接点またはタイムリレーの電流によって保持されます。 一部のコンデンサモーターには、始動時に使用される遠心接点があり、モーターの動作中に開きます。 同様に、コンデンサを使用して、「スター」または「トライアングル」方式に従って三相モーターを接続します。 静電容量は、動作電圧と電流に基づいて計算されます。 または銘板モーターパワー。 単相電気モーターと同様に、三相モーターの始動が困難な場合は、始動コンデンサーが使用されます。このコンデンサーの容量は、動作中のモーターの公称値の2〜3倍です。 始動コンデンサを使用して三相電気モーターを220Vネットワークに接続する場合、このような接続方式では、モーターが完全な効率で動作せず、最大電力を発生しないことに注意する必要があります。 多くの異なるコンデンサがありますが、目的の静電容量値が見つからない場合は、それらを並列または直列に接続できます。 これらの接続方法を組み合わせることで、必要な容量定格に近づくことができます。
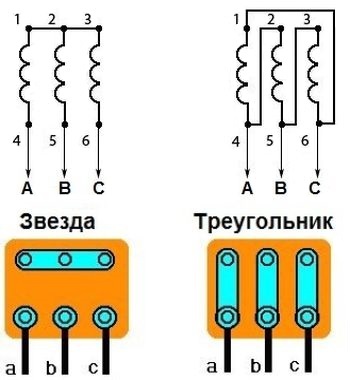
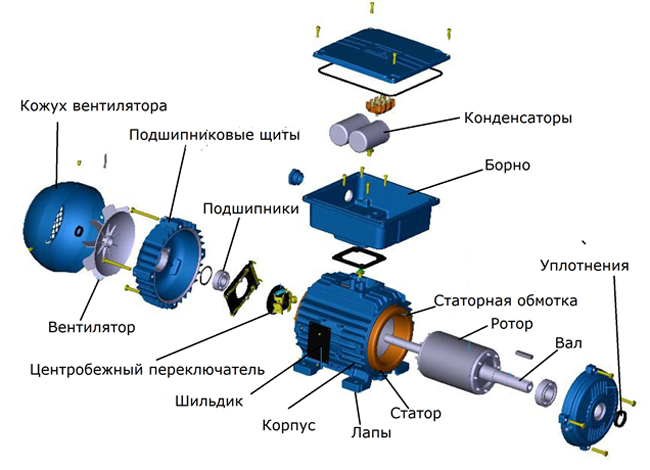
非同期三相モーターは、単相モーターよりも効率的であり、はるかに一般的です。 モータートラクションで動作する電気機器は、ほとんどの場合、三相電気モーターを備えています。 電気モーターは、回転ローターと固定ステーターの2つの部分で構成されています。 ローターはステーターの内側にあります。 両方の要素には導電性の巻線があります。 固定子巻線は、120電気度の距離で磁気回路の溝に配置されます。 巻線の始点と終点を引き出して2列に固定します。 連絡先には文字Cのマークが付いており、それぞれに1から6までのデジタル指定が割り当てられています。 主電源に接続されたときの固定子巻線の相は、次のいずれかの方式に従って接続されます。 経由の接続 複合スキーム 5kWを超える出力のエンジンに適用されます。 « スター»固定子巻線のすべての端の接続を1点で呼び出します。 それぞれの先頭に電力が供給されます。 巻線が独立気泡内で直列に接続されている場合、 " 三角形"。 端子との接点は、列が相互にシフトするように配置され、C1はC6出力の反対側に配置されます。 三相ネットワークから固定子巻線への供給電圧は、回転子を動かす回転磁界を生成します。 の後に発生するトルクは、開始するのに十分ではありません。 トルクを上げるために、追加の要素がネットワークに含まれています。
家庭用ネットワークに接続する最も簡単で一般的な方法は、移相コンデンサを使用して接続することです。 両方のタイプの電気ネットワークから電圧を供給する場合、誘導モーターの回転子速度はほぼ同じになります。 同時に、三相ネットワークの電力は、同様の単相ネットワークよりも高くなります。 したがって、三相電気モーターを単相ネットワークに接続すると、必然的に顕著な電力損失が発生します。 もともと家庭用ネットワークに接続するように設計されていない電気モーターがあります。 家庭用の電気モーターを購入するときは、すぐにかご形回転子を備えたモデルを探すことをお勧めします。 定格供給電圧に応じて、国内生産の非同期三相モーターは、220/127Vおよび380/220Vネットワークで動作するように2つのカテゴリに分類されます。220/127Vネットワークで動作するように設計されたモーターは低電力です-今日、それらの使用は厳しく制限されています。 定格電圧380/220V用に設計された電気モーターは至る所にあります。
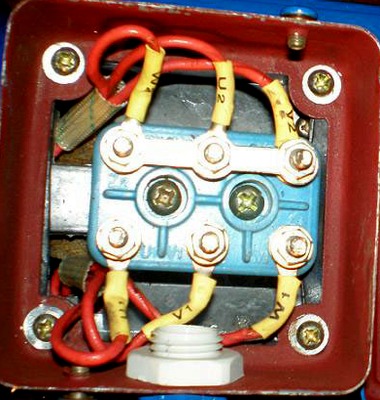
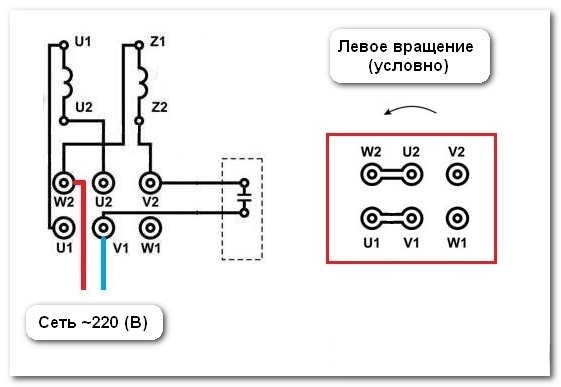
定格電圧に関係なく、モーターを取り付けるときは、ルールが使用されます:「デルタ」に接続されたときに使用される低い電圧値、高い値-「スター」に従って固定子巻線の接続にのみ使用されます" 図式。 つまり、電圧 220 V「 三角形», 380 V-「 スターそうしないと、モーターがすぐに燃え尽きてしまいます。 推奨される接続方式や変更の可能性など、ユニットの主な技術的特性は、モータータグとそのテクニカルパスポートに表示されます。 Δ/Yの形式のラベルの存在は、巻線を「星」と「三角形」の両方で接続する可能性を示しています。 単相家庭用ネットワークで動作するときに避けられない電力損失を最小限に抑えるには、このタイプのモーターを「三角形」に接続することをお勧めします。 Y記号は、「デルタ」に接続する可能性が提供されていないモーターを示します。 このようなモデルのジャンクションボックスでは、6つの接点ではなく、3つしかなく、他の3つの接続はケースの下で行われます。 標準の単相ネットワークへの定格供給電圧220/127Vの三相の接続は、「スター」タイプに従ってのみ実行されます。 低供給電圧用に設計されたユニットを「三角形」に接続すると、すぐに使用できなくなります。 「スター」のモーター巻線の接続は、よりソフトなスタートを提供します。 この場合、ユニットの電力が大幅に失われます。 このスキームによれば、380Vの国内起源のすべての電気モーターも接続されています。 デルタ接続は公称値の最大70%の出力電力を提供しますが、同時に始動電流が重要な値に達し、モーターが故障する可能性があります。 このスキームは、定格電圧400/690用に設計されたヨーロッパ製の輸入電気モーターをロシアの電力ネットワークに接続するための唯一の正しいオプションです。 スターデルタスイッチング方式の始動機能は、両方の接続オプションが実装されているΔ/Yとマークされたモーターにのみ使用されます。 始動電流を減らすために、「スター」に接続するとエンジンが始動します。
エンジンが加速すると、可能な限り最高の出力を得るためにデルタにシフトします。 組み合わせた方法の使用は、必然的に電流サージと関連しています。 回路を切り替える瞬間に電流供給が停止し、ローター速度が低下し、場合によっては急激に低下します。 しばらくすると、回転速度が回復します。
![]() ,
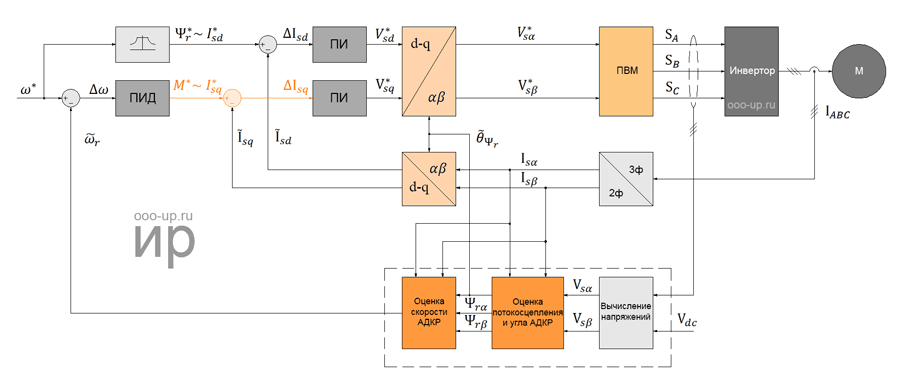
,エネルギー変換
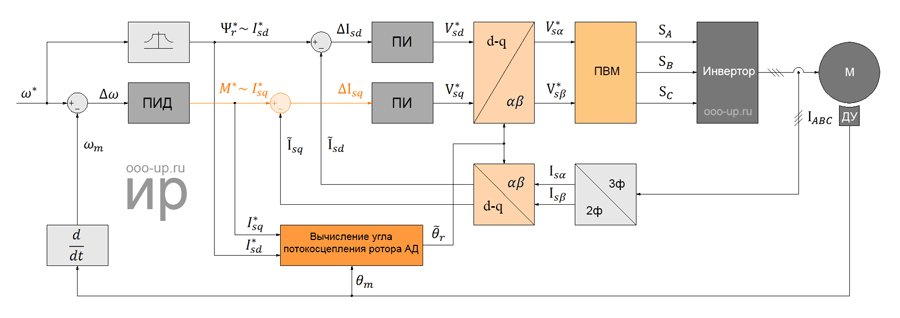
電気モーターの回転子の磁束リンケージの位置に関する情報を取得する方法によると、次のことが区別されます。
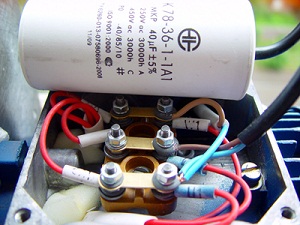
コンデンサとは何ですか?
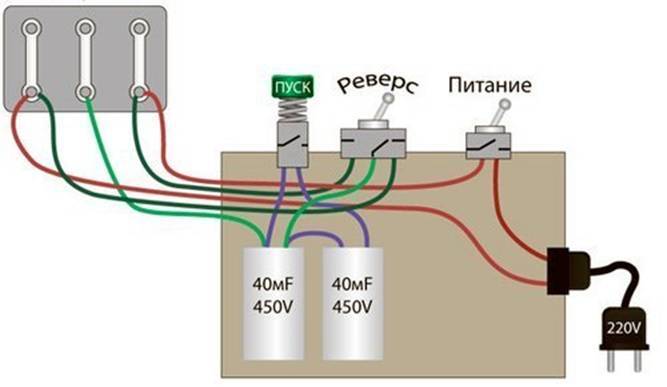
ご存知のように、静電容量は、その中の電圧と電流の位相シフトに影響を与える電気回路の唯一のパラメータではありません。 インダクタンスも電気回路に位相シフトを引き起こしますが、電圧と電流の角度の比率は異なります。 しかし、コンデンサの代わりにチョークが電気回路に含まれていると、始動巻線の電流強度が大幅に低下し、その結果、これらの巻線が生成する弱い磁場のためにエンジンが始動しなくなります。 したがって、コンデンサは、単相電気ネットワークの電気モーターの固定子で有効な移動磁場を取得するのに適した唯一の要素です。適切なコンデンサを選択する方法は?
電気モーターのスイッチを入れるスキームの選択
 非常にまれなケースですが、本番環境では、すべての電力を絞り出すために、スターデルタスイッチング回路を組み合わせて使用します。 これについては、記事の最後で詳しく説明します。
非常にまれなケースですが、本番環境では、すべての電力を絞り出すために、スターデルタスイッチング回路を組み合わせて使用します。 これについては、記事の最後で詳しく説明します。電気モーター接続図スターデルタ
スターデルタ回路の接続
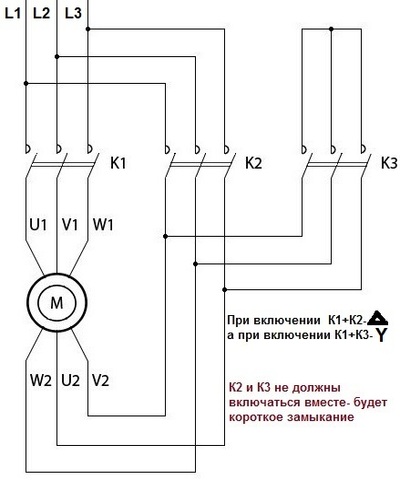
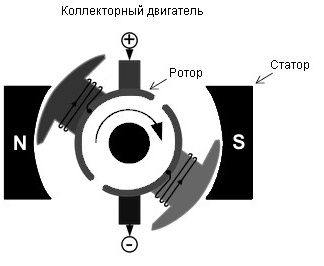
コレクターモーターの動作原理
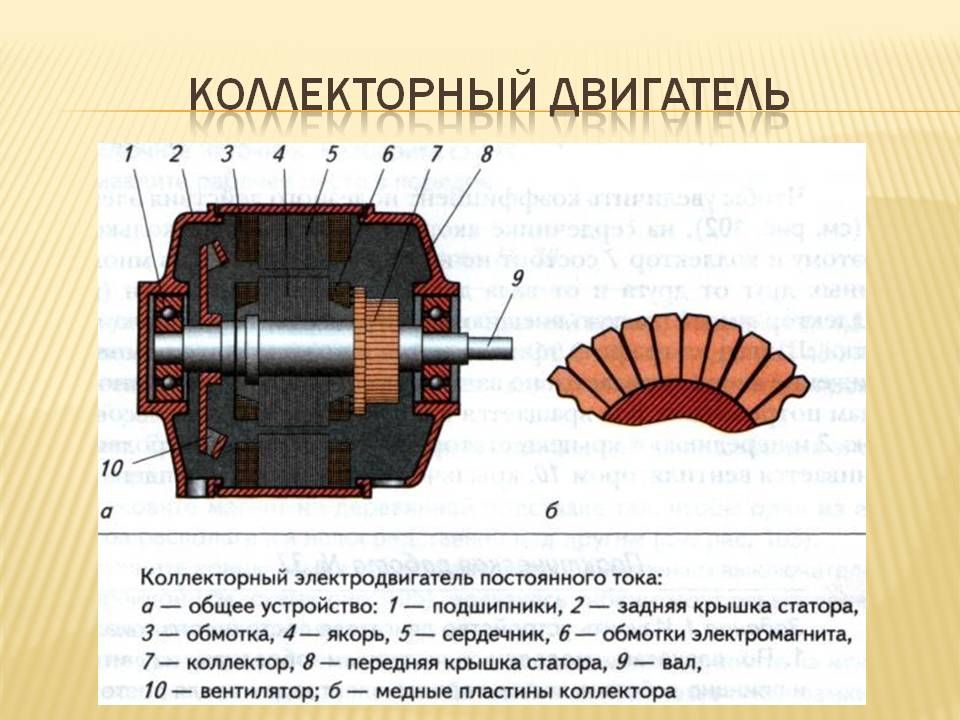
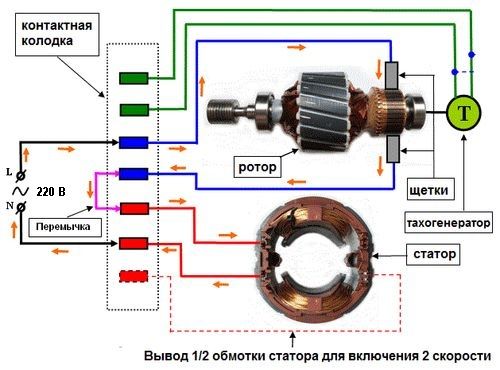
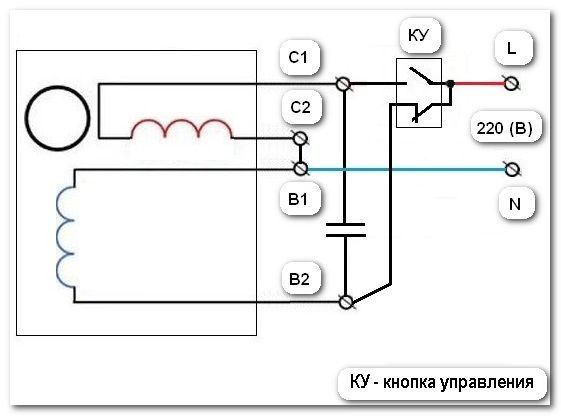
コレクターモーターの220Vネットワークへの接続
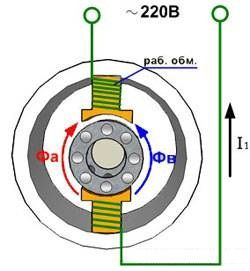
単相非同期電動機の動作原理
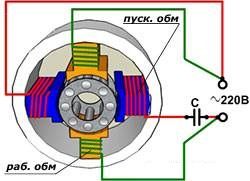
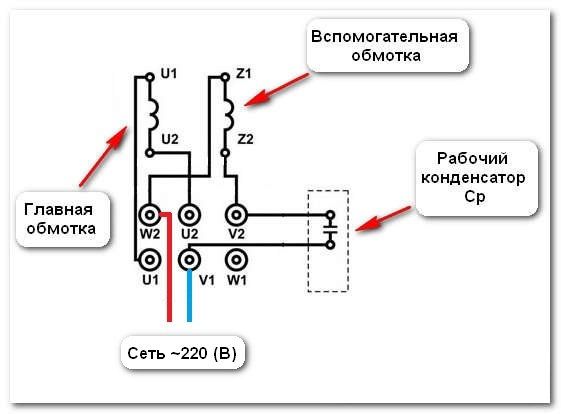
単相非同期電動機の場合、接続図が必要です。これは、主巻線と追加巻線の結論、およびコンデンサの静電容量を示しています。
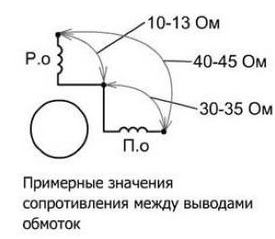 エンジンの設計が許せば、リードの所有権を視覚的に判断できます。作業巻線のワイヤの断面積(太さ)が大きくなります。
エンジンの設計が許せば、リードの所有権を視覚的に判断できます。作業巻線のワイヤの断面積(太さ)が大きくなります。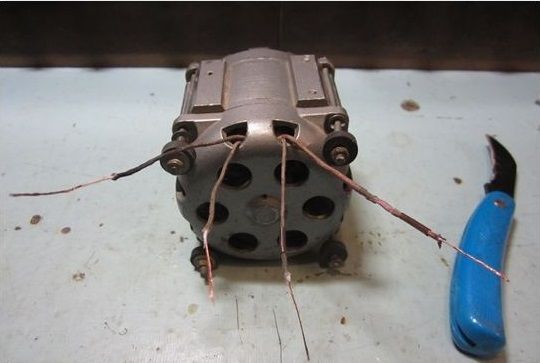
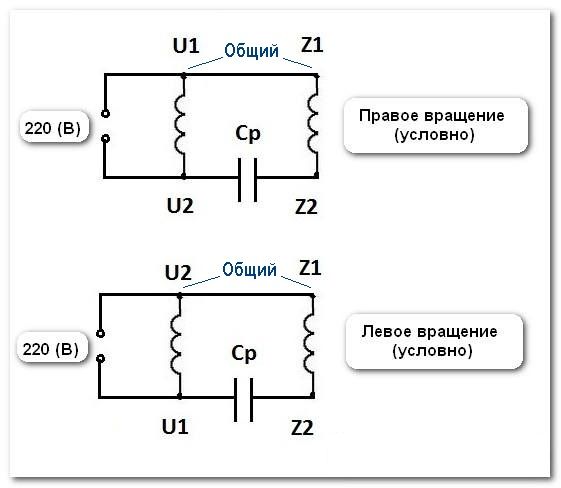
単相モーターモード

三相モーターを220Vネットワークに接続する



このようなエンジンを完全に動作させるには、380 Vネットワークを実行するか、強力なパワー半導体スイッチを使用して位相シフトを生成する特定の電力用に設計された複雑な電子回路を使用することで得られる3つのフェーズが必要です。
定格電圧の異なるネットワークでモーターを「スター」と「デルタ」に接続する
さまざまな方法で接続されたときの電気モーターの動作の特徴
電気モーターを「三角形」と「星」で接続することは、その長所と短所の特定のセットによって特徴付けられます。ビデオのスター接続とデルタ接続の例



