これは、ステーターとローターという 2 つの主要部分で構成されます。 ステーターは静止部分、ローターは回転部分です。 ローターはステーターの内側に配置されます。 ローターとステーターの間にはエアギャップと呼ばれる小さな距離があり、通常は 0.5 ~ 2 mm です。
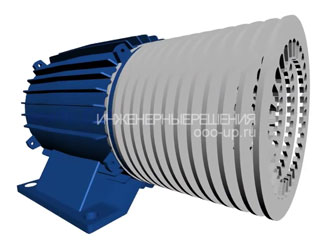
非同期モーターのステーター
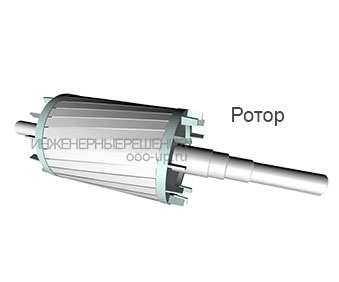
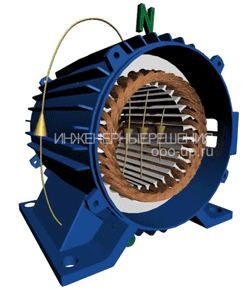
非同期モーターローター
ステータ本体と巻線を備えたコアで構成されます。 ステータコアは、通常厚さ 0.5 mm の薄い工業用鋼板から組み立てられ、絶縁ワニスでコーティングされています。 積層コア設計により、回転磁界によるコアの磁化反転過程で発生する渦電流を大幅に低減します。 固定子巻線はコアのスロットに配置されます。

非同期電動機のハウジングとステータコア
非同期モーターの積層コアの設計
ローター短絡巻線を備えたコアとシャフトで構成されます。 ローターコアも積層設計になっています。 この場合、電流の周波数が低く、酸化膜が渦電流を制限するのに十分であるため、ローターシートにはワニスは塗布されません。
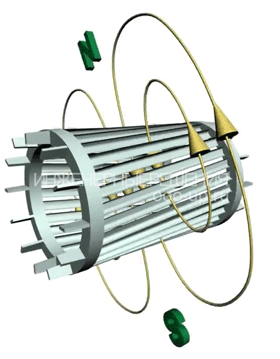
動作原理。 回転磁場
三相動作の原理は、三相電流網に接続されたときに三相巻線が回転磁界を生成する能力に基づいています。
打ち上げ
停止
非同期電動機の回転磁界
この磁界の回転周波数、または同期回転周波数は、交流電流 f 1 の周波数に正比例し、三相巻線の極対の数 p に反比例します。
 ,
,
- ここで、n 1 はステータ磁場の回転周波数 rpm、
- f 1 – 交流周波数、Hz、
- p – 極対の数
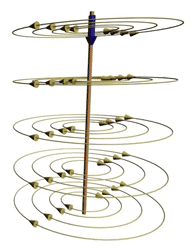
回転磁場の概念
回転磁界現象をよりよく理解するために、3 回巻いた単純化された三相巻線を考えてみましょう。 導体を流れる電流は、導体の周囲に磁場を生成します。 以下の図は、特定の時点で三相交流によって生成される磁界を示しています。
打ち上げ
停止
直流電流による直線導体の磁界
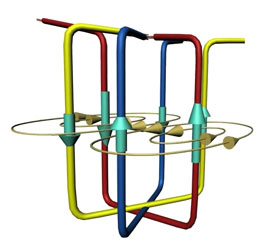
巻線によって発生する磁場
交流の成分は時間の経過とともに変化し、それによって生成される磁場が変化します。 この場合、結果として生じる三相巻線の磁界は、同じ振幅を維持しながら、異なる方向をとります。
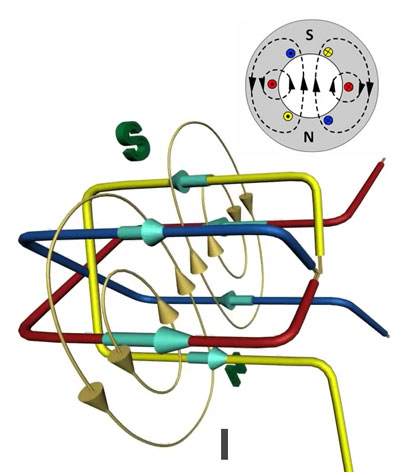
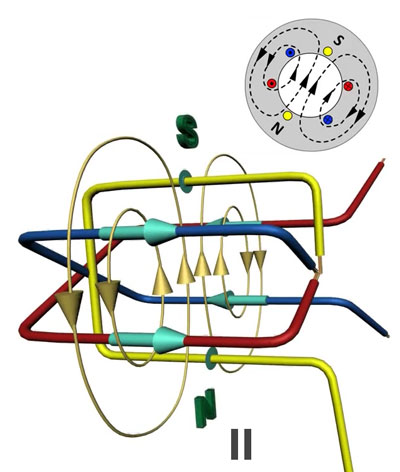
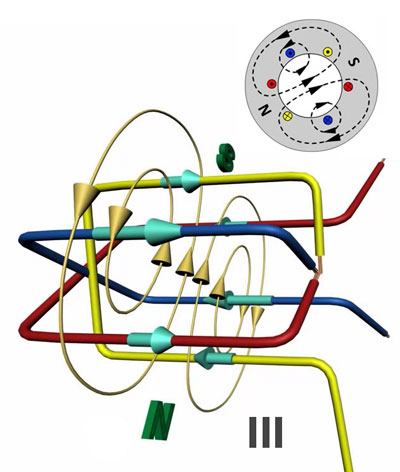
異なる時間に三相電流によって生成される磁場
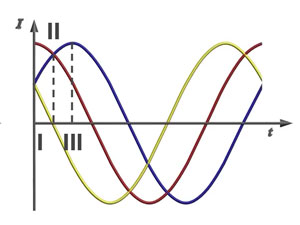
電気モーターのターンに流れる電流 (60°シフト)
打ち上げ
停止
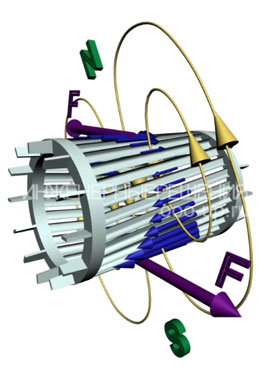
閉ループに対する回転磁場の影響
次に、回転磁場の中に閉じた導体を配置してみましょう。 磁場が変化すると、導体に起電力 (EMF) が発生します。 次に、EMF によって導体に電流が発生します。 したがって、磁場内には電流が流れる閉じた導体が存在し、それに応じて力が作用し、その結果として回路が回転し始めます。
電流が流れる閉じた導体に対する回転磁場の影響
非同期モーターのかご型ローター
この原則も機能します。 非同期モーターの内部には、電流が流れるフレームの代わりに、かご型ローターがあり、そのデザインはかご型の車輪に似ています。 かご型ローターは、端がリングで短絡されたロッドで構成されています。

誘導電動機で最も広く使用されているかご形回転子 (シャフトとコアなしで示されています)
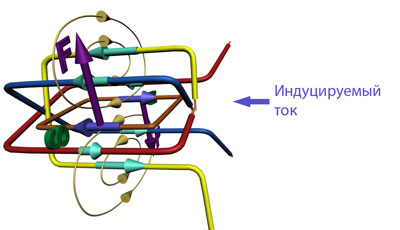
三相交流が固定子巻線を通過すると、回転磁界が生成されます。 したがって、これも前述したように、ロータバーに電流が誘導され、ロータが回転を開始します。 下の図では、ロッド内の誘導電流の違いに気づくことができます。 これは、磁場に対するロッドの位置が異なるため、磁場の変化の大きさがロッドのペアごとに異なるという事実によって発生します。 ロッド内の電流の変化は時間とともに変化します。
打ち上げ
停止
かご型ローターを貫く回転磁場
ローター アームが回転軸に対して傾いていることにも気づくでしょう。 これは、EMF の高調波を低減し、トルク リップルを取り除くために行われます。 ロッドが回転軸に沿って方向付けられている場合、巻線の磁気抵抗が固定子の歯の磁気抵抗よりもはるかに高いという事実により、脈動磁場がロッド内に発生します。
非同期モーターのスリップ。 ローター速度
非同期モーターの特徴は、ローター速度 n 2 がステーター磁界の同期速度 n 1 よりも遅いことです。
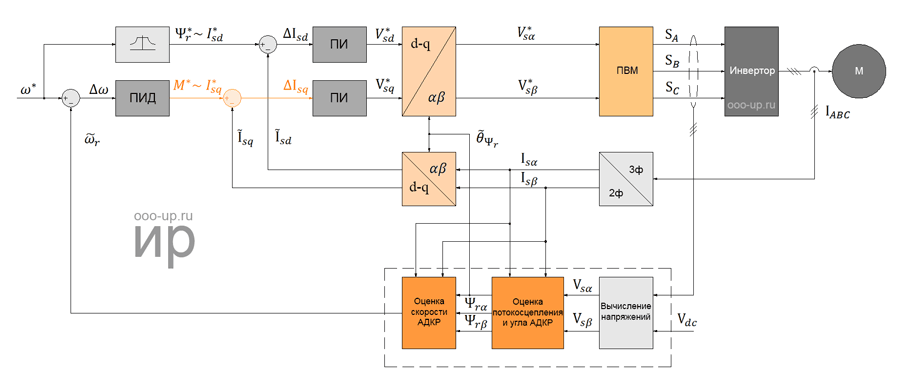
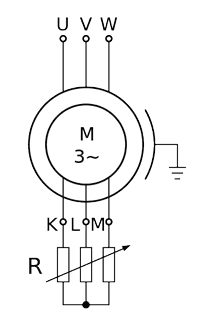
これは、回転速度 n 2 が等しくない場合にのみ、回転子巻線のロッド内の EMF が誘導されるという事実によって説明されます。 ロータの回転周波数がステータ磁界の回転周波数と一致する場合を考えてみましょう。 この場合、ローターの相対磁場は一定であるため、ローターロッド内に EMF は発生せず、電流も発生しません。 これは、ローターに作用する力がゼロになることを意味します。 これによりローターの速度が低下します。 その後、交流磁場が再びローターロッドに作用し、誘導電流と誘導力が増加します。 実際には、ローターがステーターの磁場の回転速度に達することはありません。 ローターは同期速度よりわずかに遅い一定の速度で回転します。 非同期モーターのスリップは 0 ~ 1、つまり 0 ~ 100% の範囲で変化します。 s~0 の場合、これはアイドル モードに対応し、エンジン ローターは実質的に反作用トルクを受けません。 s=1 の場合 - モーターローターが静止している短絡モード (n 2 = 0)。 スリップはモーターシャフトの機械的負荷に依存し、その増加とともに増加します。 モータの定格負荷に応じた滑りを定格滑りといいます。 低および中出力の非同期モーターの場合、定格スリップは 8% から 2% まで変化します。 ローター位置センサーを使用した非同期電気モーターのフィールド指向制御 フィールド指向制御を使用すると、動作パラメータ (速度とトルク) をスムーズかつ正確に制御できますが、その実装にはエンジン ローターの鎖交磁束の方向とベクトルに関する情報が必要です。 ローター位置センサーを使用しない非同期電気モーターのフィールド指向制御 巻線ローターを使用したモーターの始動は、ローター回路内の始動レオスタットを使用して実行されます。 ワイヤーおよび液体可変抵抗器が使用されます。 金属加減抵抗器段階的に行われ、ある段階から別の段階への切り替えは、コントローラーのハンドル (その重要な要素は接点が取り付けられたシャフトである) を使用して手動で行うか、コンタクターまたは電動コントローラーを使用して自動的に実行されます。 液体加減抵抗器電極が下がっている電解液の入った容器です。 レオスタットの抵抗は、電極の浸漬深さを変更することによって調整されます。 効率を高めてブラシの摩耗を軽減するために、一部の ADFR には特殊な装置 (短絡機構) が組み込まれており、始動後にブラシを持ち上げてリングを閉じます。 レオスタティック始動では、低い始動電流値で高いトルク値が得られるため、良好な始動特性が得られます。 現在、ADDF はかご型誘導電動機と周波数変換器の組み合わせに置き換えられています。![]() ,
,エネルギー変換
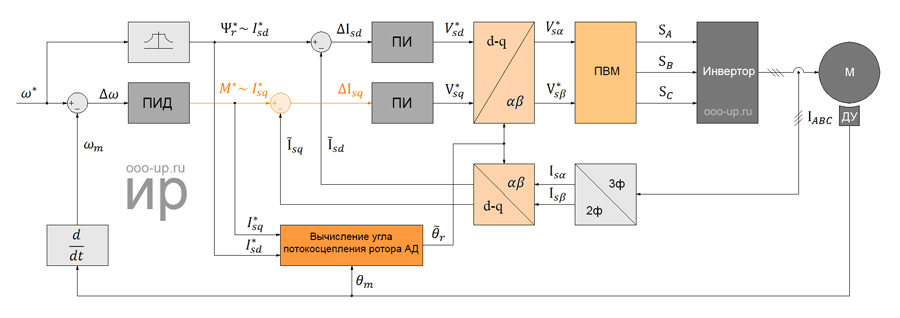
電動機回転子の鎖交磁束の位置に関する情報を取得する方法に応じて、以下が区別されます。