多くの場合、三相非同期モーターは産業用および家庭用アプリケーションで使用されます。 このタイプのエンジンは非常に一般的であるため、エンジントラクションで動作する、私たちによく知られているデバイスのほとんどは、まさにそのようなもので動作します。 このエンジンは、可動ローターとステーター(それぞれ静止)の2つの主要部分のみで構成されています。 巻線は、120電気度に等しい特別な角距離で固定子コアに配置されます。 これらの巻線の始点と終点はジャンクションボックスに引き出され、そこで特別な端子に固定されます。 原則として、これらの結論は、それぞれ文字C-C1、C2、および最大C6で示されます。 巻線は、「スター」と「トライアングル」の2種類の電気回路で接続できます。 スター回路では、巻線の端が互いに接続されています。巻線の始点は供給電圧に接続されています。 三角回路は直列接続で構成されています。つまり、1つの巻線の始点が他の巻線の端に接続され、以下同様に続きます。
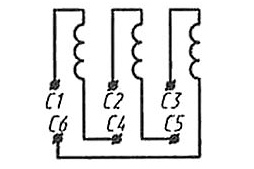
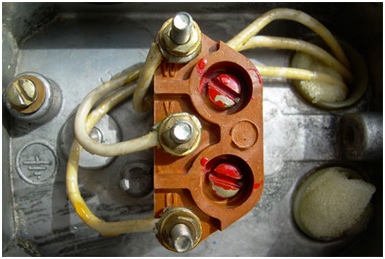
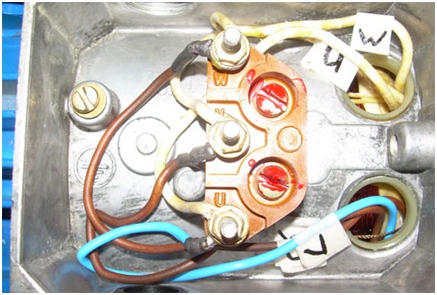
三角図によると、これが三相モーターの接続方法です。
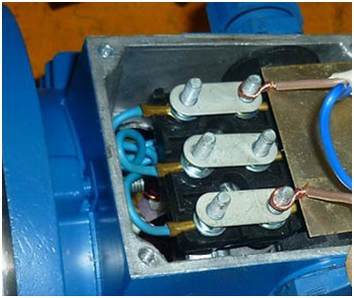
モータージャンクションボックスの内側、デルタ接続用のジャンパーの位置
通常、ジャンクションボックスでは、すべての接点出力とその端子が逆の順序でシフトされて配置されます。 つまり、C6はC1接点の反対側にあり、C4はC2端子の反対側にあります。
これは、接点がジャンクションボックスに配置される方法です
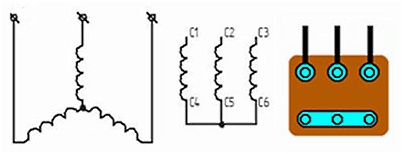
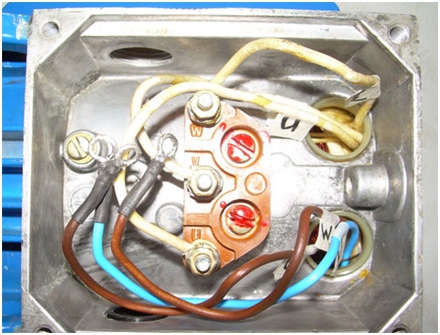
これは、「スター」スキームに従って、三相モーターが接続される方法です
ライブ、スター接続されたジャンクションボックスは次のようになります
三相モーターをそれぞれ三相ネットワークに接続することにより、異なる時間に固定子巻線内に電流が流れ始め、それによって回転磁界が発生します。 この回転磁界は、磁気誘導によってモーターのローターを駆動し、その結果、モーターが回転し始めます。 三相モーターを単相ネットワークに接続すると、機械に十分なトルクがなくなり、単にオンになりません。
当然、直接実行しても起動しません。 ただし、「三相」をネットワークに接続する方法はいくつかあります。 最も簡単な方法の1つは、位相シフトコンデンサを3番目のピンとして接続することです。
自宅で三相モーターを接続する方法(単相ネットワーク)
単相ネットワークで動作する三相モーターの速度は、三相ネットワークで動作する場合とほぼ同じです。 ただし、この接続により、非同期モーターの電力が大幅に削減されます。 これは、ネットワーク自体の電力が不十分なためです(3相のものと比較して)。 単相接続で電力がどれだけ正確に失われるかを言うには、接続図、非同期モーターの動作条件、およびコンデンサの静電容量の値を知る必要があります。 ただし、平均して、単相ネットワークに接続された各3相モーターは、それ自体の電力の最大30%または50%を失う可能性があります。
すべての三相モーターが単相ネットワークで正常に動作できるわけではないことに注意してください。 したがって、接続していて接続が正しいことは確かであるが、同時に完全に機能しなくなった場合でも、心配する必要はありません。 確率が高い場合、これはエンジン自体に問題があることを意味します。 もちろん、電力の損失に関係なく、大多数は正常に動作するはずです。 したがって、インデックスが「A」と「AOL」、「AO2」と「APN」の非同期モーターは、単相ネットワークでの作業で最も信頼性が高いことが証明されました。 それらのすべては、かご形回転子を持っています。
原則として、三相非同期モーターには、定格電圧に関して2つのカテゴリがあります。これは220/127Vおよび380/220Vネットワークで機能します。 低電圧のモーターは低電力で使用されるため、分布はほとんどありません。 したがって、より一般的なのは380/220Vカテゴリです。 「スター」に接続する場合はそれぞれ380Vの電圧が使用され、「トライアングル」回路では220Vの電圧が使用されます。 エンジンのパスポートとそのタグには、通常、動作電圧、主電源周波数、力率、巻線接続図の条件図、およびそれを変更する可能性を含む、すべての主要な性能特性と量が示されています。 。
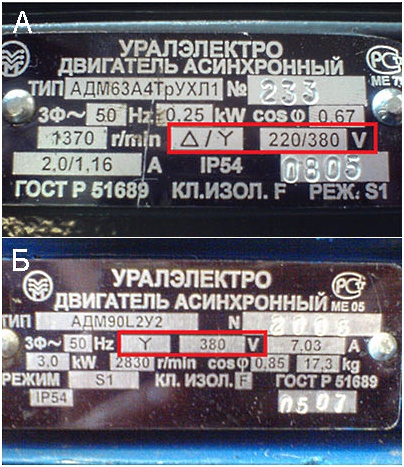
これは、三相電気モーターのハウジングのタグがどのように見えるかです。
図「A」のタグは、前述のように、巻線を両方の回路に接続できることを示しています。 あれは、220Vの電圧の「三角形」と380Vの「星」の両方を接続できます。 このようなモーターを単相ネットワークに接続する場合は、「トライアングル」接続方式を使用することに注意してください。「スター」に接続すると、電力損失が発生するためです。大幅に高い。
図「B」のタグは、モーターがスター接続方式を使用していることを示しています。 これは、「ネズミ講」を含める可能性に対応しています。 このようなアイコンが表示された場合は、ジャンクションボックスに出力が3つしかないことを確認してください。 したがって、三角形の接続を確立するには、エンジンの内部に入り、残りの端を見つけて引き出す必要があります。 これは簡単ではないので、細心の注意を払ってください。
大事なポイント! モータータグが220/127Vの形式で動作電圧を示している場合、220Vの動作電圧で単相ネットワークに接続すると、「スター」回路でのみ可能であり、それ以上は不可能であることに注意してください。 「三角形」の回路を備えたエンジンを220Vネットワークに接続しようとすると、単に燃え尽きてしまいます。
巻線の始まりと終わりを理解する方法は?
三相モーターを家庭用ネットワークに接続する際の最も紛らわしい問題の1つは、ジャンクションボックスにつながるワイヤで発生する混乱です。 さらに、場合によっては、ボックスが欠落している可能性があり、あなた自身がどこでどのワイヤーを把握する必要があります。
最も単純なケースは、380/220Vのモーター動作電圧で巻線が「三角形」回路に接続されているケースです。 したがって、開始図に従って、ジャンクションボックス内の動作コンデンサと開始コンデンサを端子に接続することによって、ネットワークからの導線を接続するだけで済みます。 モーター接続回路がスターに閉じているが、デルタに切り替えることができる場合は、接点ジャンパーを使用して回路を変更することにより、これを利用する必要があります。
さて、すべての巻線の始まりと終わりの定義についてです。 6本のワイヤーがマーキングなしでジャンクションボックスに単に突き出ている場合、それは非常に困難です。 この場合、どちらの巻線が始点で、どちらが終点であるかを理解することは困難です。 したがって、少し緊張してこの問題を解決する必要があります。 エンジンで何かをする前に、エンジンのメーカーについてインターネットをチェックしてください。 おそらく、既存の配線を解読できるいくつかのドキュメントがネットワーク上にあります。 ただし、有用な情報が見つからなかった場合は、次のように行動します
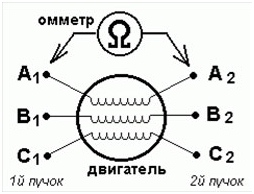
同じ巻線に関係するワイヤのペアを決定します。
そして、どちらの結論が始まりで、どちらが終わりかを判断します。
ワイヤのペアの決定は、テスターの助けを借りて「ダイヤル」することによって実行されます(抵抗測定モードが設定されています)。 そのようなデバイスが手元にない場合は、「祖父」の方法を使用し、電球とバッテリーを使用して巻線の端の所有権を判断できます。 ランプが点灯する(またはデバイスが抵抗の存在を示す)場合、これは2本のワイヤが同じ巻線に属していることを意味します。したがって、巻線リードの残りのペアも決定されます(下の図では、これが図に示されています)。
2番目のタスクでは、どの結論が始まりで、どちらが終わりであるかを確認する必要があります。 これを行うには、バッテリーとポインター電圧計を用意する必要があります(これには電子機器は機能しません)。 次に、下の図に従って、巻線の開始と終了を決定します。
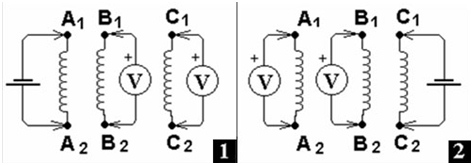
したがって、バッテリーは1つの巻線の端に接続されます(しかし、図のように)、そして巻線の端までで既存の電圧計を接続します。 巻線のバッテリー線で接点が切れたときしかし、電圧計ポインタで、いずれかの側に逸脱する必要があります。 どちらかを覚えて、巻線に対して同じアクションを実行しますからそれに電圧計を接続することによって。 次に、巻線の電圧計の針を確認しますから巻線と同じ方向にずれているで。 これは、極性を変更する(端を変更する)ことで実現できますC1と C2)。 巻線も同様にチェックします。しかし。 その後、バッテリーはに接続されますからまた で、および電圧計は、それぞれ、しかし.
したがって、すべての巻線を「鳴らした」後、ある程度の規則性を得る必要があります。 巻線のバッテリーの接点を壊すと、他の2つは、同じ方向の電圧計の針の偏差を示すはずです(これは同じ極性を示します)。 その後、一方では結論(始まり)(A1、B1、C1)に、他方では結論(終わり)にマークを付けることが残っています。 最終段階で、端を適切な「星」または「三角形」のパターンに接続します。
巻線の欠けている端を取り除く方法は?
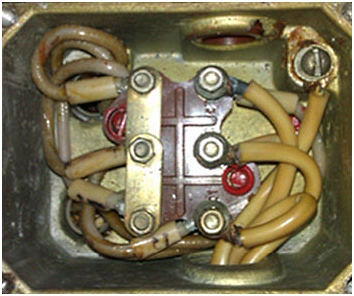
このケースはおそらく最も難しいケースの1つです。 したがって、「スター」に接続されたモーターは「デルタ」に切り替わりません。 実際には、ジャンクションボックスを開くと、3つの出力(C1、C2、およびC3)のみが表示されます。 残りの3つ(C4、C5、C6)はエンジン内部から取り出す必要があります。 下の図はまさにそのような場合を示しています。

問題のケースのモータータグ
そして、これはターミナルボックスの内部がどのように見えるかです
まず、ステーターに自由にアクセスできるように、エンジンを分解する必要があります。 これを行うには、ボルトで固定されているエンジンのエンドカバーを取り外し、その可動部分であるローターを取り外す必要があります。 次に、巻線の残りの端をはんだ付けする場所を見つけて、絶縁体からそれをきれいにする必要があります。 その後、リード線の端を外し、柔軟な絶縁体で事前に準備されたより線をはんだ付けします。 さらにはんだ付けポイントを絶縁し、固定子巻線に強い糸でワイヤを固定します。 最終的に、追加のはんだ付けされたワイヤがジャンクションボックスに出力されます。
ここで、上記の方法で巻線の開始と終了を決定し、利用可能なすべての結論C1、C2などを指定する必要があります。 すべてのワイヤを識別したら、安全に三角形の接続を行うことができます。 このようなアクションには、特定の経験とスキルが必要であることに注意してください。 つまり、これについて複雑なことは何もありませんが、実際には、固定子内部のワイヤのスパイクで混乱し、巻線を短絡する可能性があります(たとえば)。 したがって、デルタ接続が特に必要ない場合は、接続をそのまま、つまり「スター」のままにしておくことをお勧めします。

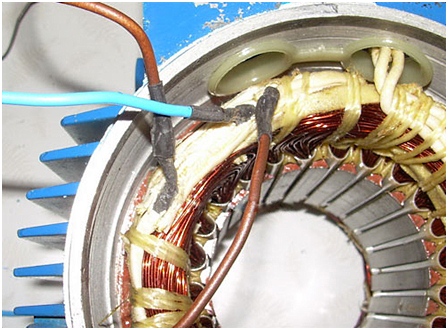
三相モーターステーター
追加のワイヤーをはんだ付けする
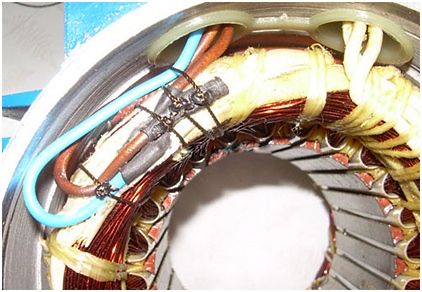
このようにして、ワイヤーはしっかりとねじ込まれます
ジャンクションボックス内の導体の結論
「三角形」回路で導体を接続する
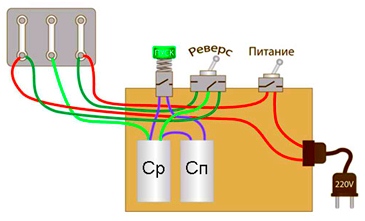
三相モーターを家庭用ネットワークに接続するときに使用されるスキーム
三角形のパターン。
この場合の三相モーターの出力電力は他のスキームよりもいくらか大きくなるため、このスキームは家庭用ネットワークに最も適切で適切です。 したがって、「三角形」接続の電力は、公称値の70%になる可能性があります。 エンジン出力。 ジャンクションボックスでは、次のようになります。2つの接点がネットワークに接続され、3番目の接点が動作コンデンサCpに接続され、次に任意のネットワーク接点に接続されます。
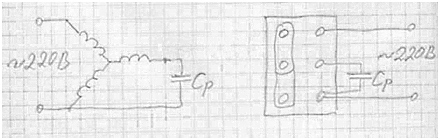
これが図が紙に描かれる方法です
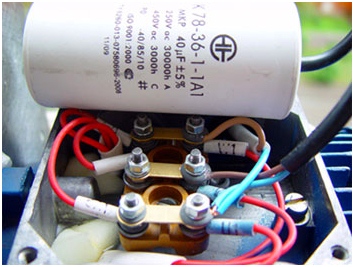
そして、これは実際にどのように見えるかです
起動
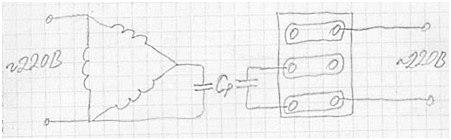
動作中のコンデンサを使用して、アイドル状態で三相モーターを始動することができます。 ただし、少しでも負荷がかかると起動しない場合や、電源が入って低速で動作しない場合があります。 したがって、そのような場合、追加の機器、すなわち始動コンデンサSpが使用される。 コンデンサの必要な静電容量を決定するための計算は、以下にあります。 参考までに、このようなコンデンサ(他の場合はコンデンサのグループ)は、エンジンを始動するためだけに機能します。 その結果、それらの動作時間は非常に短く、通常はミリ秒ですが、最大2秒になることもあります。 このような短期間で、エンジンは必要なパワーを得る時間が必要です。
始動コンデンサSpを備えた回路
エンジンをより便利に操作するために、始動および操作回路にスイッチを追加することができます。 これは、スタートボタンを押すと1対の接点が閉じるという単純な原理で機能します。 「停止」ボタンが押されて接点が開くまで、回路全体がこのモードで動作します。

ソ連製のスイッチ
リバースの適用
一方向または別の方向への回転子の回転は、3番目の巻線が接続されている相によって異なります。
逆回路
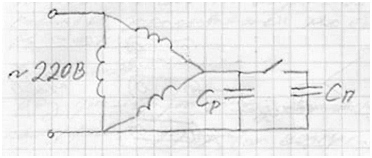
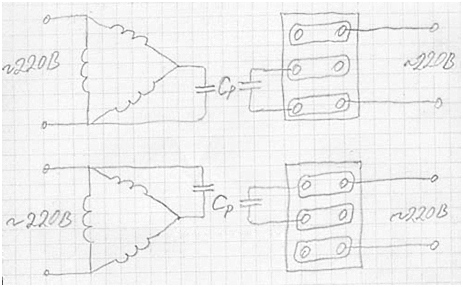
したがって、1次巻線と2次巻線の接点に接続されている3次巻線にスイッチ(タンブラー)を備えた追加のコンデンサを接続することにより、三相電気モーターの回転子の回転方向を変えることができます。 以下に、上記の3つの方法すべてを使用した図を明確に示します。これにより、3相モーターでの作業がより便利になります。
スターコネクション
この方式は、巻線が220 / 127Vの電圧で動作する場合に、「三相」を家庭用ネットワークに接続するときに使用されます。
三相電気モーター「スター」の接続
コンデンサに必要な静電容量の計算。 そのため、モーター接続図や他の多くのパラメーターに基づいて、動作中のコンデンサーの静電容量の計算が行われます。 スター接続の場合、計算は次のように実行されます。
水=2800∙I / U;
巻線を三角形で接続し、次のように作業容量を計算します。
Cp=4800∙I/U;
ここで、コンデンサの動作容量はCpで表され、マイクロファラッドで測定されます。私とUそれぞれ電流と電圧です。 ここでU\ u003d 220V、それ以外の場合は、次の式で計算します。
私= P /(1.73∙U∙n∙cosϕ);
P-エンジンの出力を示します。
N-「三相」の効率。
Cosϕは力率です。
1.73-線形電流と相電流の関係を示します。
効率と力率の値は、モータータグに記載されています。 原則として、これらの値は0.8〜0.9の範囲でおおよそ変動します。
実際には、動作中のコンデンサの静電容量の値は、次の式に従って計算できることが示されています。C=70∙ Pn; ここで、Rnは定格電力です。 この式は、巻線を「デルタ」に接続するときに一貫しており、それに応じて、100ワットごとに約7マイクロファラッドの静電容量が必要になります。 電気モーターの安定した動作は、コンデンサーがどれだけ正しく選択されているかに依存します。 容量を必要以上に高く選択すると、エンジンが過熱します。 開始容量の場合必要以上に少ないことが判明したため、エンジン出力はやや過小評価されます。 コンデンサは選択方法で選択できます。 したがって、小さなコンデンサから始めて、最適な選択になるまで、より強力なコンデンサに移ります。 ネットワークと動作中のコンデンサの電流を測定できる場合は、最も正確なコンデンサを選択する機会があります。 この測定は、エンジンの動作モードで実行する必要があります。
始動能力は、十分な始動トルクを生成するための要件に基づいて計算されます。 始動コンデンサの静電容量と始動容量の値を混同しないでください。 たとえば、上の図では、開始容量は2つの容量CpとSpの合計です。
電気モーターをアイドル状態で使用する場合は、始動容量を作動容量と見なすことができ、さらに始動コンデンサーは不要になります。 このような場合、スキームは大幅に簡素化され、安価になります。このような対策は、負荷を切り離すのに役立ち、たとえばベルトドライブを緩めたり、そのための圧力ローラーを作成したりするなど、エンジンの位置をすばやく便利に変更することができます。
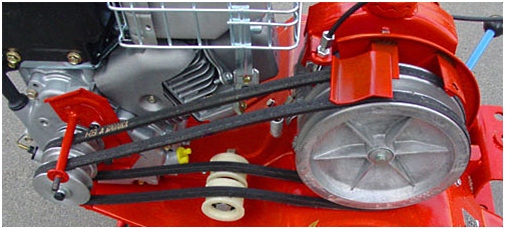
ウォークビハインドトラクターのVベルトトランスミッションの例
エンジンを始動するには、始動にのみ必要な追加の静電容量Spが必要です。 切断容量を増やすと、始動トルクが増加し、ある値で始動トルクがピーク値に達します。 ただし、容量をさらに増やすと、始動トルクが低下するだけなので、これを考慮する必要があります。
公称負荷に近い負荷で電気モーターを始動するためのすべての計算と条件に基づいて、始動容量の値は、動作時の1倍または3倍を超える必要があります。 たとえば、動作中のコンデンサの静電容量が80マイクロファラッドの場合、開始コンデンサの静電容量は80〜160マイクロファラッドになります。 これにより、160〜240 uFの開始容量(前述のようにCpとCnの合計)が加算されます。 ただし、始動時の負荷がわずかである場合、始動コンデンサの静電容量は、完全に存在しないとは言えないまでも、いくらか小さくなります。 エンジンを始動するために動作するコンデンサは、実際にはミリ秒単位で動作するため、長時間使用され、原則として、予算モデルで十分です。
最良のオプションは、1つのコンデンサではなく、コンデンサブリッジに結合されたグループを使用することです。 これは、グループを接続することにより、コンデンサを切断または接続することにより、必要な静電容量をより正確に調整できるという意味でより便利です。 ブリッジを形成する小さなコンデンサは、このような接続で静電容量が調整されるため、並列に接続されます。Ctot = C1 + C2 + C3 +…+Cn.
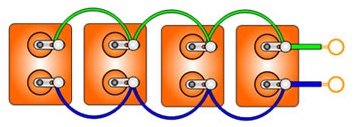
これは、並列接続がどのように見えるかです
金属化紙コンデンサは動作コンデンサとして機能し、MBGO、K78-17、BGTなどのフィルムコンデンサも優れています。 許容値の電圧は、電気モーターの動作中に主電源電圧を少なくとも1.5〜2倍超える必要があります。

したがって、三相モーターを単相ネットワークに接続するには、注意深い数学的分析と電気機器の経験が必要です。
電気についての詳細:



