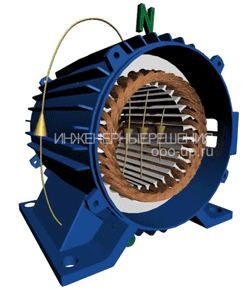
Sastoji se od dva glavna dijela - statora i rotora. Stator je stacionarni dio, rotor je rotirajući dio. Rotor je postavljen unutar statora. Između rotora i statora postoji mali razmak, koji se naziva zračni razmak, obično 0,5-2 mm.
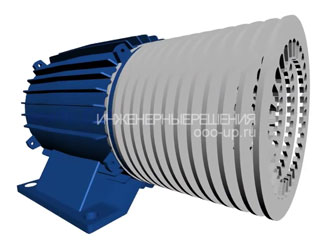
Stator asinhronog motora
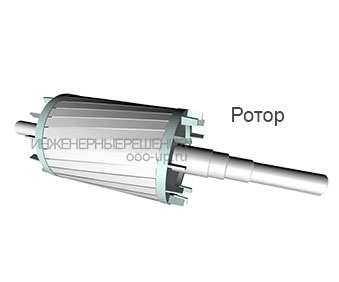
Rotor asinhronog motora
Stator sastoji se od tijela i jezgra sa namotajem. Jezgro statora je sastavljeno od tankog tehničkog lima, obično debljine 0,5 mm, premazanog izolacijskim lakom. Dizajn laminiranog jezgra doprinosi značajnom smanjenju vrtložnih struja koje nastaju tokom procesa preokretanja magnetizacije jezgra rotirajućim magnetnim poljem. Namotaji statora nalaze se u prorezima jezgra.

Kućište i jezgro statora asinhronog elektromotora
Dizajn laminiranog jezgra asinhronog motora
Rotor sastoji se od jezgre sa kratkospojnim namotajem i osovine. Jezgro rotora takođe ima laminirani dizajn. U ovom slučaju, listovi rotora nisu lakirani, jer struja ima nisku frekvenciju i oksidni film je dovoljan da ograniči vrtložne struje.
Princip rada. Rotirajuće magnetno polje
Princip trofaznog rada zasniva se na sposobnosti trofaznog namotaja, kada je spojen na trofaznu strujnu mrežu, da stvori rotirajuće magnetsko polje.
Pokreni
Stani
Rotaciono magnetsko polje asinhronog elektromotora
Frekvencija rotacije ovog polja, odnosno frekvencija sinhrone rotacije, direktno je proporcionalna frekvenciji naizmjenične struje f 1 i obrnuto proporcionalna broju parova polova p trofaznog namotaja.
 ,
,
- gdje je n 1 frekvencija rotacije magnetskog polja statora, o/min,
- f 1 – frekvencija naizmjenične struje, Hz,
- p – broj parova polova
Koncept rotacionog magnetnog polja
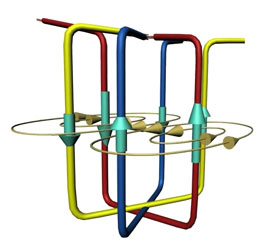
Da biste bolje razumjeli fenomen rotirajućeg magnetnog polja, razmislite o pojednostavljenom trofaznom namotu s tri zavoja. Struja koja teče kroz provodnik stvara magnetsko polje oko njega. Slika ispod prikazuje polje koje stvara trofazna naizmjenična struja u određenom trenutku
Pokreni
Stani
Magnetno polje pravog provodnika sa jednosmernom strujom
Magnetno polje koje stvara namotaj
Komponente naizmjenične struje mijenjat će se tokom vremena, uzrokujući promjenu magnetnog polja koje stvaraju. U ovom slučaju, rezultirajuće magnetsko polje trofaznog namota će imati različite orijentacije, zadržavajući istu amplitudu.
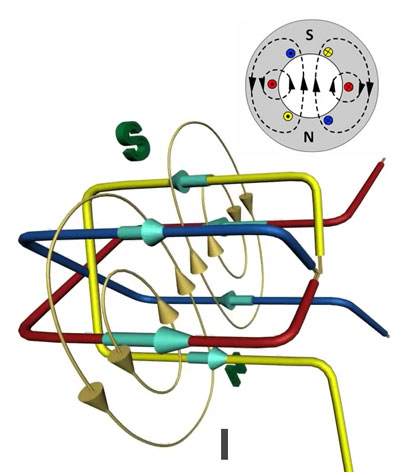
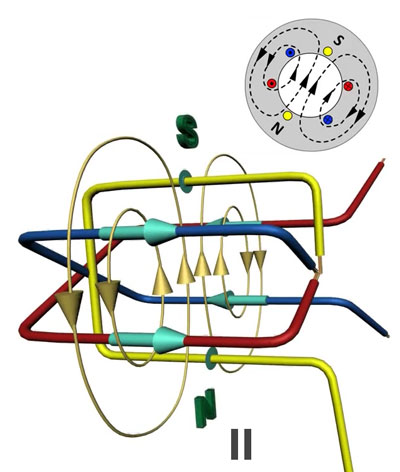
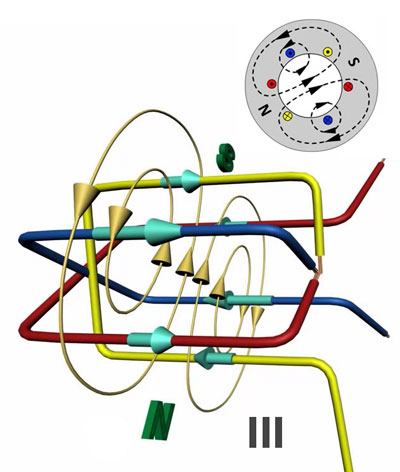
Magnetno polje koje stvara trofazna struja u različito vrijeme
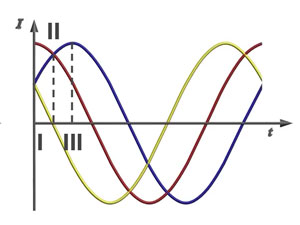
Struja koja teče u zavojima elektromotora (pomak 60°)
Pokreni
Stani
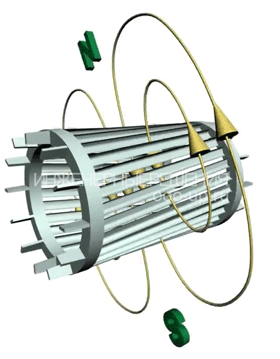
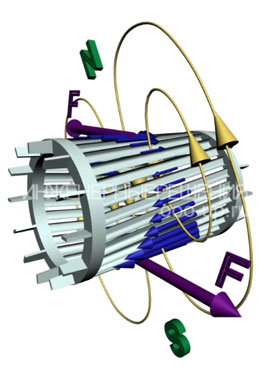
Učinak rotirajućeg magnetnog polja na zatvorenu petlju
Sada stavimo zatvoreni provodnik unutar rotirajućeg magnetnog polja. Promjenjivo magnetsko polje će dovesti do pojave elektromotorne sile (EMF) u vodiču. Zauzvrat, EMF će uzrokovati struju u vodiču. Dakle, u magnetskom polju će postojati zatvoreni vodič sa strujom, na koji će u skladu s tim djelovati sila, zbog čega će se krug početi okretati.
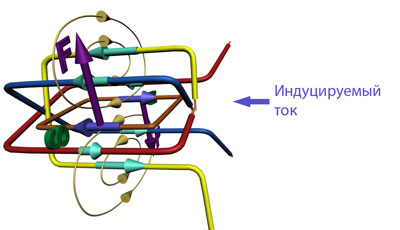
Utjecaj rotirajućeg magnetnog polja na zatvoreni vodič kroz koji teče struja
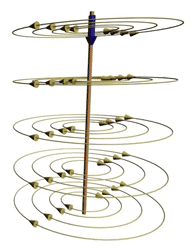
Kavezni rotor asinhronog motora
Ovaj princip takođe funkcioniše. Umjesto strujnog okvira, unutar asinhronog motora nalazi se kavezni rotor čija konstrukcija podsjeća na vjeverica. Kavezni rotor se sastoji od šipki kratko spojenih na krajevima s prstenovima.

Kavezni rotor koji se najčešće koristi u indukcijskim motorima (prikazano bez osovine i jezgra)
Trofazna izmjenična struja, prolazeći kroz namotaje statora, stvara rotirajuće magnetsko polje. Tako će se, također kao što je ranije opisano, inducirati struja u šipkama rotora, uzrokujući da se rotor počne okretati. Na slici ispod možete uočiti razliku između induciranih struja u štapovima. To se događa zbog činjenice da se veličina promjene magnetskog polja razlikuje u različitim parovima štapova, zbog njihove različite lokacije u odnosu na polje. Promjena struje u štapovima će se mijenjati s vremenom.
Pokreni
Stani
Rotirajuće magnetno polje koje prodire u kavezni rotor
Također možete primijetiti da su krakovi rotora nagnuti u odnosu na os rotacije. Ovo je učinjeno kako bi se smanjili viši harmonici EMF-a i riješili talasanja momenta. Ako bi šipke bile usmjerene duž osi rotacije, tada bi u njima nastalo pulsirajuće magnetsko polje zbog činjenice da je magnetski otpor namota mnogo veći od magnetskog otpora zubaca statora.
Proklizavanje asinhronog motora. Brzina rotora
Posebnost asinhronog motora je da je brzina rotora n 2 manja od sinhrone brzine magnetskog polja statora n 1 .
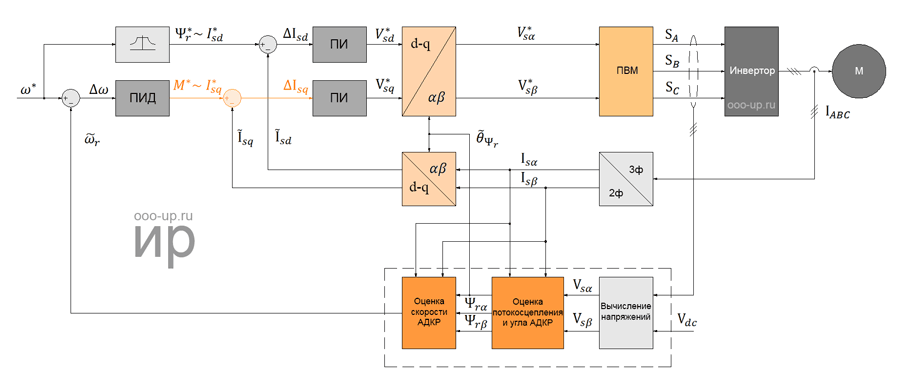
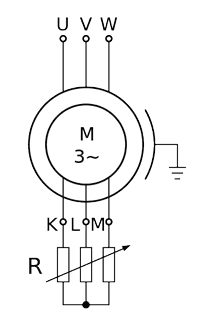
Ovo se objašnjava činjenicom da se EMF u šipkama namota rotora inducira samo kada su brzine rotacije n 2 nejednake Razmotrimo slučaj kada se frekvencija rotacije rotora poklapa sa frekvencijom rotacije magnetskog polja statora. U ovom slučaju, relativno magnetsko polje rotora će biti konstantno, tako da se EMF, a samim tim ni struja, neće stvarati u šipkama rotora. To znači da će sila koja djeluje na rotor biti nula. Ovo će usporiti rotor. Nakon čega će na rotorske šipke ponovo djelovati naizmjenično magnetsko polje, čime će se inducirana struja i sila povećati. U stvarnosti, rotor nikada neće dostići brzinu rotacije magnetnog polja statora. Rotor će se okretati određenom brzinom koja je nešto manja od sinhrone brzine. Proklizavanje asinhronog motora može varirati u rasponu od 0 do 1, odnosno 0-100%. Ako je s~0, onda ovo odgovara načinu rada u praznom hodu, kada rotor motora praktično ne doživljava suprotni moment; ako je s=1 - režim kratkog spoja, u kojem rotor motora miruje (n 2 = 0). Proklizavanje ovisi o mehaničkom opterećenju osovine motora i povećava se s njegovim rastom. Klizanje koje odgovara nazivnom opterećenju motora naziva se nazivno klizanje. Za asinhrone motore male i srednje snage, nazivno proklizavanje varira od 8% do 2%. Terensko orijentisano upravljanje asinhronim elektromotorom pomoću senzora položaja rotora Upravljanje orijentirano na teren omogućava vam da glatko i precizno kontrolirate parametre kretanja (brzinu i obrtni moment), ali njegova implementacija zahtijeva informacije o smjeru i vektoru veze fluksa rotora motora. Terensko orijentisano upravljanje asinhronim elektromotorom bez senzora položaja rotora Pokretanje motora s namotanim rotorom vrši se pomoću startnog reostata u krugu rotora. Koriste se žičani i tekući reostati. Metalni reostati su stepenasti, a prelazak iz jednog stupnja u drugi se vrši ili ručno pomoću ručke kontrolera, čiji je bitan element osovina na kojoj su montirani kontakti, ili automatski pomoću kontaktora ili kontrolera na električni pogon. Tečni reostat je posuda sa elektrolitom u koju se spuštaju elektrode. Otpor reostata se podešava promjenom dubine uranjanja elektroda. Da bi se povećala efikasnost i smanjilo trošenje četkica, neki ADFR-ovi sadrže poseban uređaj (mehanizam kratkog spoja), koji nakon pokretanja podiže četke i zatvara prstenove. Reostatskim pokretanjem postižu se povoljne karakteristike pokretanja, jer se pri niskim vrijednostima startne struje postižu visoke vrijednosti momenta. Trenutno se ADDF-ovi zamjenjuju kombinacijom asinhronog motora s kaveznim kavezom i frekventnog pretvarača.![]() ,
,Pretvorba energije
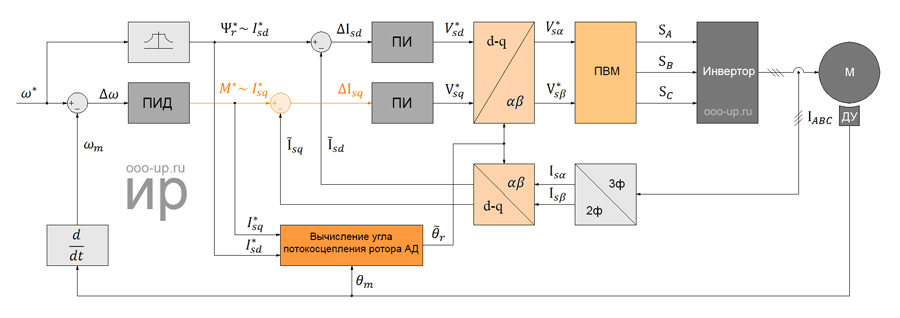
Prema načinu dobivanja informacija o položaju spojnice fluksa rotora elektromotora razlikuju se sljedeće: